机构名称:
¥ 1.0
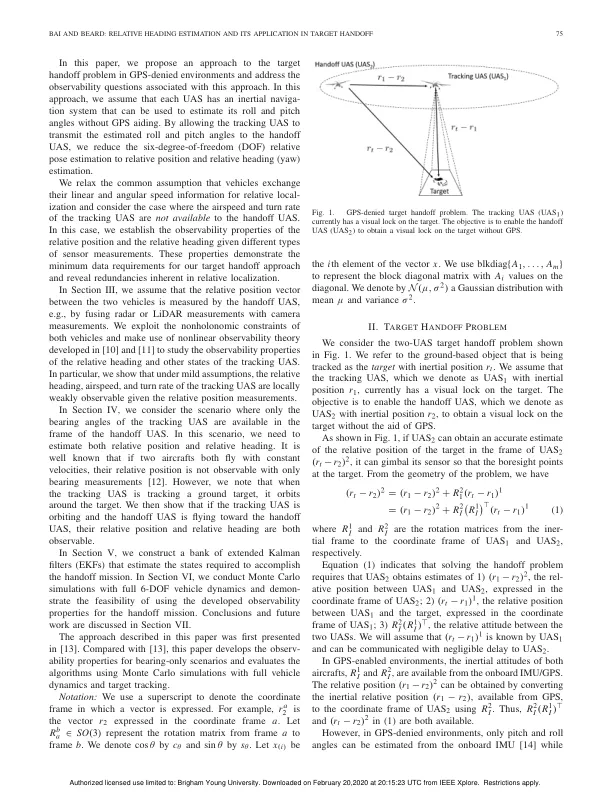
摘要 — 在本文中,我们解决了两架无法使用全球定位系统的固定翼飞机之间的目标切换问题。该问题需要估计飞行器之间的相对姿势。我们假设机载惯性测量单元可以提供飞机姿态的横滚和俯仰估计。我们研究了完成切换问题所需的其他相对状态的可观测性。具体来说,我们考虑了两种不同的情况。在第一种情况下,我们假设测量了飞机之间的相对位置,就像雷达或激光雷达传感器的情况一样。我们假设两架飞机不交换空速和转弯速率信息。在温和的假设下,我们表明两架飞机之间的相对航向是可观测的。在第二种情况下,我们假设只测量两架飞机之间的方位角,就像视觉传感器的情况一样。我们证明了与目标跟踪和切换相关的机动的状态可观测性。我们还提出了一种估计算法,该算法使用一组扩展卡尔曼滤波器来估计相对状态。全车动态仿真结果证明了所提方法的可行性。索引术语 — 多机器人系统、非线性滤波器、非线性可观测性、姿势估计、无人机。
相对航向估计及其在 GPS 拒绝环境中的目标切换中的应用
主要关键词




相关文件推荐