机构名称:
¥ 2.0
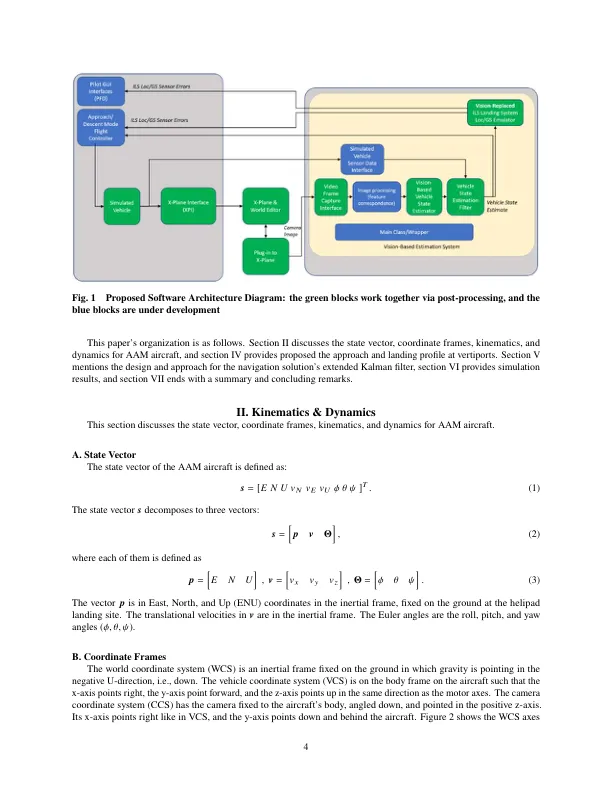
先进空中机动 (AAM) 飞机需要感知系统,以便在城市、郊区、农村和区域环境中实现精确进近和着陆系统 (PALS)。目前批准用于自动进近和着陆的最先进的方法将难以用于支持 AAM 操作概念。但是,来自其他应用和低 TRL 研究的技术和系统使用视觉、红外、雷达和 GPS 方法为 AAM 飞机进近和着陆提供基线感知和传感要求。本文重点介绍基于视觉的 PAL,以演示闭环基线控制器,同时遵守联邦航空管理局的要求和规定。共面算法确定姿势估计,并将其输入到扩展卡尔曼滤波器中。将 IMU 与视觉相结合,为 GPS 拒绝的环境创建传感器融合导航解决方案。状态估计会导致下滑道和定位器误差计算,这对于设计和推导 AAM PALS 的制导律和控制律至关重要。 IMU 和视觉导航解决方案为 AAM PALS 提供了有希望的模拟结果,更高保真度的模拟将包括计算机图形渲染和特征对应。
基于视觉的先进精密进近和着陆...
主要关键词




相关文件推荐