机构名称:
¥ 1.0
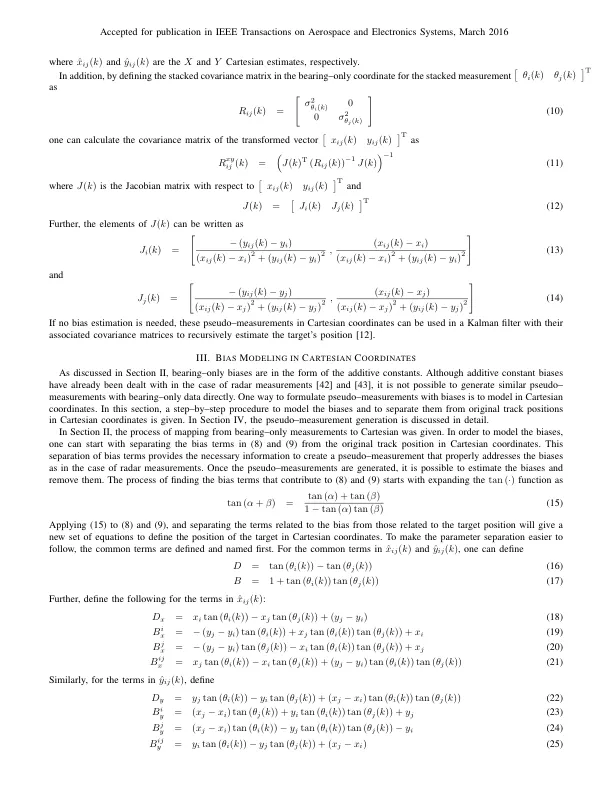
纯方位估计是目标跟踪中的基本问题之一,也是具有挑战性的问题。与雷达跟踪的情况一样,偏移或位置偏差的存在会加剧纯方位估计的挑战。对各种传感器偏差进行建模并非易事,文献中专门针对纯方位跟踪的研究并不多。本文讨论了纯方位传感器中偏移偏差的建模以及随后的带偏差补偿的多目标跟踪。偏差估计在融合节点处处理,各个传感器以关联测量报告 (AMR) 或纯角度轨迹的形式向该节点报告其本地轨迹。该建模基于多传感器方法,可以有效处理监视区域中随时间变化的目标数量。所提出的算法可得出最大似然偏差估计器。还推导出相应的 Cram´er-Rao 下限,以量化所提出的方法或任何其他算法可以实现的理论精度。最后,给出了不同分布式跟踪场景的模拟结果,以证明所提出方法的能力。为了证明所提出的方法即使在出现误报和漏检的情况下也能发挥作用,还给出了集中式跟踪场景的模拟结果,其中本地传感器发送所有测量值(而不是 AMR 或本地轨道)。
多传感器 – 多目标 – 仅方位传感器配准
主要关键词




相关文件推荐