XiaoMi-AI文件搜索系统
World File Search System固定翼
研究文章固定的指导、导航和控制...
本文的目的是开发一种既具有垂直起飞 (VTOL) 能力又具有固定翼飞机能力的固定翼飞机。为了实现这一目标,开发了一种带有两个螺旋桨的固定翼旋翼机原型,其旋翼可以像无人机一样机动,同时还具有类似直升机的垂直起降能力。这项研究为旋翼机提供了制导、导航和控制算法。首先,本研究描述了固定翼飞机的动力学及其控制输入,即油门、桨叶螺距和推力矢量。其次,分析了来流速度、作用在旋翼叶片上的力以及影响旋翼速度的因素。然后,给出了旋翼、双引擎、机翼以及垂直和水平尾翼的数学模型。随后,设计了使用全球处理系统 (GPS) 模块的飞行控制策略。检查的参数包括姿态、速度、高度、转弯和起飞控制。最后,基于硬件在环 (HWIL) 的仿真证明了导航制导和控制机制的有效性和稳健性。仿真证实,所提出的新机制是稳健的,并满足任务要求。旋翼机在整个飞行过程中保持稳定,并有效地操纵指定路径。

垂直起飞和着陆的开发和测试...
1。简介一般而言,飞机可以分为两类:固定翼和旋转翼,既有优点和缺点。传统固定翼航空车的空气动力学在[1]中介绍,[2-4]中的传统旋转飞机在[1]中提供。关于物体的空气动力学,它受两个主要力的影响:升降和拖动。升力作用于相对风,并反对另一种称为重量的力。阻力与相对风平行,并反对称为推力的力。固定翼航空车的运行取决于有足够的起飞跑道的可用性,这导致了该地点的关键选择。另一方面,这种平台的飞行范围明显长于旋转翼航空车提供的时间。在[3,4]中,有关影响旋转空中的空气动力学的更详细的研究

QPlane:一个用于...的开源强化学习工具包
强化学习 (RL) 是一个快速发展的研究领域,由于 RL 与游戏任务的兼容性,它主要应用于视频游戏领域。AI Gym 已成为强化学习研究的黄金标准工具包。不幸的是,像 AI Gym 这样的工具包针对基准目的进行了高度优化,可能并不总是适合现实世界类型的问题。此外,固定翼飞行模拟有特定要求,可能需要其他解决方案。在本文中,我们提出 QPlane 作为固定翼飞机 RL 训练的替代工具包。QPlane 的开发旨在创建一个用于固定翼飞机模拟的 RL 工具包,该工具包可轻松修改以适应不同的场景。QPlane 可复制且灵活,易于实现高性能计算,并且模块化,可快速更换环境和算法。在本文中,我们将介绍和讨论 QPlane 的细节以及概念验证结果。
AD-A267 115 •7 22 O 6, - DTIC
可能会有人问:“直升机和固定翼飞机都是重于空气的飞行器,因此直升机的疲劳和结构完整性与固定翼飞机的疲劳有何不同?”答案在于,通过旋翼而不是固定机翼产生升力会产生一个由高速率施加的大型动态载荷控制的载荷环境。事实上,有人提出,也许不太客气,但确实如此,对直升机部件进行疲劳测试的最简单方法是将它们安装在直升机上,然后让直升机施加疲劳载荷。
AD 2 - EGDY - 1 - 1 英国军事 AIP YEOVILTON
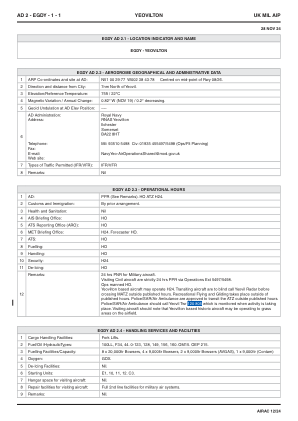
4. 注意。直升机和空中交通管制员可能在死区启用。5. 来访的固定翼空中交通管制员应在 40 海里(喷气式飞机)、20 海里(活塞式飞机)和近端呼叫进近。6. 飞行员不得飞越 2000 英尺 AGL 以下的 GLASTONBURY、SHEPTON MALLET 或 EVERCREECH。7. 飞行员应自行导航到 10 海里或 2000 英尺以上的航线,并切换到塔台。空中交通管制员通常应在 26 号跑道的 1000 英尺 QFE 处的跑道 THR 处或 04、08 或 22 号跑道的交叉口处“中断”。8. 对于固定翼飞机的恢复,初始点位于 3 海里、1500 QFE 处,并且位于死区。 9. 由于固定翼 / 旋翼飞机混合飞行,死角是通过球形雷达罩北侧并与正在使用的跑道平行绘制的一条线。
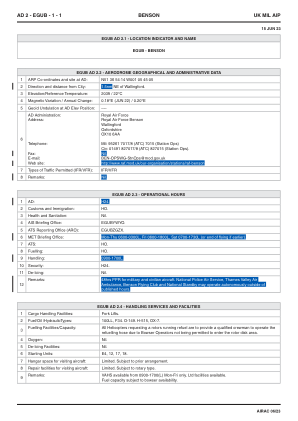
AD 2 - EGUB - 1 - 1 英国军事 AIP BENSON
1. 旋翼飞机在 1000 英尺 QFE 以内可进行带电和无电操作。2. 不得飞越 Benson、Ewelme 和 Wallingford 村庄。3. 来访机组人员应注意,固定翼飞机的进场和停机位由不低于 600 英尺 QFE 的 Tutor/轻型固定翼飞机负责。4. 跑道西侧不得有滑行道,目前为西环路车道。5. 按照 VFR 或 IFR 进行目视进场时,尾流湍流分离的责任应由飞行员承担。小尾流湍流飞机之间的建议距离为 3 海里。为减少 RTF,同一尾流湍流类别的飞机之间将取消口头警告传输。6. Star-NG 雷达周围存在高敏感度 HIRTA(高强度无线电传输区),应避免出现这种情况。这不会影响任何英国固定翼或旋翼飞机起飞、降落或飞越任何跑道。距离雷达的安全距离为 376 米,最低安全高度为离地 357 英尺。机组人员应在安全的情况下避开 HIRTA,并在必要时与 ATC 协商,避免与其他交通发生冲突。

带有非线性控制的纵向飞机动力学...
由于刚体动力学、气动力和控制映射项中的非线性以及欠驱动,固定翼飞机模型的控制设计可能具有挑战性。未建模动力学或参数不确定性的存在会使问题更具挑战性。本文研究固定翼飞机的纵向动力学控制,该飞机悬挂或悬挂的有效载荷就像一个附加的钟摆。此类系统出现在涉及无人机 (UAV) 收集和运送有效载荷的应用中,其中长距离飞行要求可能需要使用固定翼飞机。推导了耦合飞机有效载荷系统的动力学,并利用基于 Lyapunov 的控制设计和奇异摄动理论的工具开发了非线性控制器。控制器能够跟踪和转换预先规划或动态生成的飞行轨迹。分析与仿真结果表明,该控制器能够实现精确的飞行路径跟踪,并对载荷参数进行数值研究,以确定系统在保持飞行稳定性的前提下,实现载荷运输的能力。

