XiaoMi-AI文件搜索系统
World File Search SystemAutonomy

自主性和自主性指标 - 圣母大学
自古以来,追求自主性一直是人类文化中一个普遍的主题。本文提出并讨论了自主系统的一般定义,这自然而然地导致了建立衡量系统自主性水平的指标。此定义基于系统在不确定情况下实现目标的能力,不涉及实现目标的手段,例如感知和反馈。本文认为任何自主系统都是一个控制系统,为了实现更高水平的自主性,可能需要添加传统上在运筹学和人工智能等领域开发的方法。本文介绍的工作基于作者早期关于自主航天器功能架构的工作。
自主性和自主性指标 - 圣母大学
在整个历史中,对自主性的追求一直是人类文化中一个普遍的主题。本文提出并讨论了自主系统的一般定义,这自然会引出衡量系统自主性水平的指标的建立。该定义基于系统在不确定情况下实现目标的能力,并不涉及实现目标的手段,如传感和反馈。本文认为任何自主系统都是一个控制系统,为了实现更高水平的自主性,可能需要添加传统上在运筹学和人工智能等领域开发的方法。本文介绍的工作基于作者早期关于自主航天器功能架构的研究。




机器人自主性与人类自主性:社交机器人、人工智能(AI)和自主性的本质
摘要 社交机器人是可以与人类进行社交互动的机器人。随着社交机器人及其驱动的人工智能 (AI) 变得越来越先进,它们可能会承担更多的社交和工作角色。这具有许多重要的伦理含义。在本文中,我们重点关注其中最核心的一个,即社交机器人对人类自主性的影响。我们认为,由于社交机器人的物理存在和社交能力,它们很有可能增强人类的自主性,同时也有几种抑制和不尊重人类自主性的方式。我们认为,社交机器人可以通过帮助我们实现更有价值的目标、做出更真实的选择和提高我们的自主能力来提高人类的自主性。我们还认为,社交机器人有可能损害人类的自主权,因为它反而会让我们自己实现更少的有价值的目标,做出更少的真实选择,降低我们的自主能力,使我们的自主权更加脆弱,并且不尊重我们的自主权。社交机器人对人类自主权的影响总体上是积极的还是消极的,将取决于我们未来对社交机器人的设计、监管和使用。
适应人工智能驱动的自主性
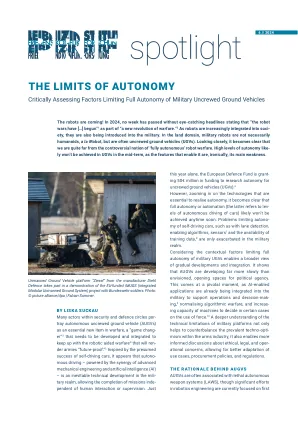
– 自动化——是指根据预先定义的规定规则自动执行特定任务的系统。例如,当工艺参数超过某些规定的限值时,反应堆保护系统会自动启动。 – 自主性——一组基于智能的功能,使系统能够对部署前未预先编程或预期的情况(即基于决策的响应)做出响应。自主系统具有一定程度的自我管理和自我指导行为,从而能够在没有外部干预的情况下弥补系统故障。
