XiaoMi-AI文件搜索系统
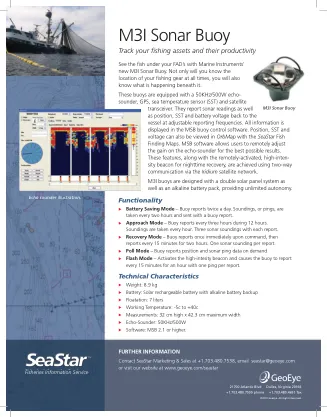
World File Search SystemBuoy

非线性沙漏浮标设计
桑迪亚国家实验室的研究人员开发了一种非线性控制技术,该技术利用了WEC沙漏的几何浮标设计和复杂的共轭控制(C3)策略,以优化多谐振条件下的功率吸收。沙漏浮标设计在波浪的重大运动或单个自由度的运动中运行,并且表现出比现有解决方案的优惠性能。沙漏浮标几何形状与海浪之间的独特相互作用产生了非线性立方存储效应,从而在操作过程中产生实际的能量存储或反应性。由于反应能力和能源存储系统(ESS)要求固有地嵌入了非线性浮标几何形状中,因此它仅需要简单的速率反馈控制,而无需存储或电源电子设备。通过专注于实现多谐和,这种开发可以增加WEC发电,使大小和重量减少,并有可能使现代WEC设计发电高效。
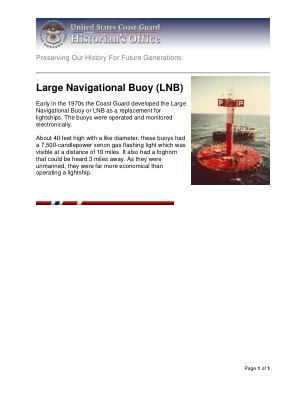
大型航海浮标 (LNB)
这些浮标高约 40 英尺,直径相同,配有 7,500 烛光氙气闪光灯,可在 10 英里外看到。它还配有一个可在 3 英里外听到的雾笛。由于它们是无人驾驶的,因此比操作灯塔船要经济得多。
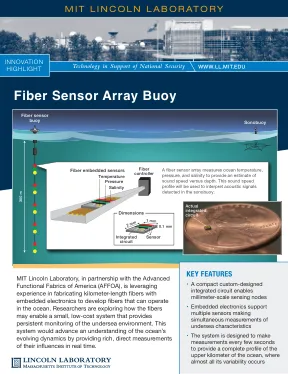

球形浮标的自由衰减升沉运动
摘要:我们在自由衰减跌落试验中研究了球形浮标的升沉运动。我们采用了一种综合方法来研究浮标的振动,包括实验测量和互补的数值模拟。实验是在配备一系列高速运动捕捉摄像机和一组高精度波浪仪的波浪池中进行的。模拟包括三组复杂程度不同的计算。具体来说,在一组计算中,流体体积 (VOF) 方法用于求解重叠网格上的不可压缩两相 Navier-Stokes 方程,而其他组中的计算则基于 Cummins 和质量弹簧阻尼器模型,这两个模型都植根于线性势流理论。实验数据与 VOF 模拟结果之间表现出极好的一致性。尽管准确性较低,但这两个降阶模型的预测也被发现相当可信。关于浮标的运动,所得结果表明,浮标从大约等于其静态平衡吃水高度(约为其半径的 60%)释放后,经历了近乎谐波阻尼的振动。进行的分析表明,浮标的吃水长度对振动的频率和衰减率有很大影响。例如,与平衡状态下半浸没的相同尺寸的球形浮标(即吃水等于半径)相比,测试浮标的振动周期大约短 20%,其振动幅度衰减速度几乎是每个周期的两倍。总体而言,本研究为浮球的运动响应提供了更多见解,可用于优化能量提取浮标设计。

带有漂流浮标数据的案例研究
摘要:在海上研究以及搜索和救援操作中,建立或预测漂流物体的轨迹很重要。可以使用带有海洋动态模型的传统工具或通过人工智能模型来确定漂移对象的轨迹。从2003年12月19日至12月28日之间收集的漂流浮标数据中,研究小组采用了CNN(CORV1D)模型进行分析。分析结果表明,通过使用ADAM优化器,Huber损耗函数和256个过滤器,在隐藏层中,该模型性能的特征参数被确定为RMSE = 0.04004,MAE = 0.032304度,R²= 98%。使用SGD优化器和均方误差(MSE)损耗函数时,与先前情况相比,RMSE和MAE值最多降低了四倍,而R²值则在隐藏层中有64个过滤器达到99.9%。当隐藏层中的过滤器数增加到128时,CNN(CORV1D)模型的性能提高了20%,RMSE = 0.007863DEG,MAE = 0.006653DEG。使用CNN(Conv1D)模型使用SGD优化器预测漂移浮标的轨迹时,R²值和MSE损耗函数接近约100%,这表明该模型适用于预测漂流浮标轨迹的输入数据。将模型隐藏层中的过滤器数量从128增加到256并没有改变模型的预测性能,这表明该情况的最佳过滤器数为128。未来的工作应继续使用较大的输入数据集进行漂移数据分析。但是,这项研究中获得的RMSE结果仍然相对较大(0.87 km),这可能是由于输入数据有限。

SMS 概况介绍 - 聪明浮标 - SharkSmart
“Clever Buoy”™ 由 Smart Marine Systems(前身为 Shark Mitigation Systems)开发,使用声纳技术和专业视频软件来探测鲨鱼并向海滩管理部门传输关键信息。声纳传感器就像指向大海的巨型前灯,安装在海底,与探测软件配合使用,可以扫描鲨鱼和海洋生物。该装置部署在冲浪区之外,搜索鲨鱼独特的运动模式。
球形浮标的自由衰减升沉运动
摘要:我们在自由衰减跌落试验中研究了球形浮标的升沉运动。采用综合方法研究浮标的振动,包括实验测量和互补数值模拟。实验是在配备一系列高速运动捕捉摄像机和一组高精度波浪仪的波浪池中进行的。模拟包括三组复杂程度不同的计算。具体来说,在一组计算中,流体体积 (VOF) 方法用于在重叠网格上求解不可压缩的两相 Navier-Stokes 方程,而其他组中的计算基于 Cummins 和质量弹簧阻尼器模型,这两个模型都植根于线性势流理论。实验数据与 VOF 模拟结果具有很好的一致性。虽然准确性较低,但两个降阶模型的预测也被发现非常可信。关于浮标的运动,获得的结果表明,在从大约等于其静态平衡吃水的高度(约为其半径的 60%)释放后,浮标经历了近谐波阻尼振动。进行的分析表明,浮标的吃水长度对振动的频率和衰减率有很大的影响。例如,与平衡状态下半浸没的相同尺寸的球形浮标(即吃水量等于半径)相比,测试浮标的振荡周期大约短 20%,并且其振荡幅度衰减速度几乎快两倍。总体而言,本研究为浮球的运动响应提供了更多见解,可用于优化浮标设计以实现能量提取。

声学海洋浮标遥测系统 - SiPLAB
空中 RaN 和水下 AcN,从而形成一个无缝网络。此外,“先进”声纳浮标可用作获取数据预处理和数据融合的中间步骤,通过此步骤可实现数据缩减。这种数据缩减意味着更短的数据上传时间,这是在敌对地区执行 REA 操作的重要前提,因为空中 RaN 节点的长期存在可能会影响任务的成功。敌对地区行动表明,“先进”声纳浮标领域必须集成一个可以随时添加或抑制节点的网络,即使使用单个“先进”声纳浮标也能执行精简的操作。声学海洋浮标 (AOB) 遥测系统希望满足“先进”声纳浮标的特性。它使用标准“IEEE 802.11”WLAN 配置集成空中 RaN,并使用水听器阵列和声源集成水下 AcN。第一台 AOB 原型机在 2003 年 [3] 和 2004 年 [4] 的海事快速环境评估海上试验中进行了测试。2005 年 9 月 15 日至 10 月 2 日,在美国夏威夷考艾岛附近的 MakaiEx 海上试验中对 AOB 的现行版本进行了测试,此次试验是在美国圣地亚哥 HLS Research Inc 推动的高频计划的背景下进行的。下面将描述 AOB 的设计,讨论主要的系统特性,介绍 MakayEx AOB 工程测试,并指出未来的发展。系统设计 AOB 的物理特性在高度(1.2 米)、直径(16 厘米)、重量(40 公斤)和自主性(12 小时)方面与标准声纳浮标相似。然而,AOB 具有先进的功能,包括:独立或网络操作;本地数据存储;专用信号处理;GPS 授时和定位;实时数据传输和中继。本节简要介绍了AOB硬件和软件,并给出了“基站”(空中RaN节点)的主要特性。
CB-1250 数据浮标用户指南 - NexSens
CB-1250 数据浮标可为重型或耗电传感器提供更高的浮力和太阳能充电,同时仍保持相对较小的占地面积。它专为部署在湖泊、河流、沿海水域、港口、河口和其他淡水或海洋环境中而设计。与所有太阳能供电的 NexSens CB 系列数据浮标一样,它是一个高度可定制的平台,可以配置 NexSens 或用户提供的电子设备。它支持各种顶部和水下传感器和测量仪器。