XiaoMi-AI文件搜索系统
World File Search Systemaset

ASET 技术报告概述
获准以技术报告代替认证考试的申请人可以提交之前作为顶点学术项目或工作任务的一部分准备的报告,但报告必须由申请人独自撰写(而不是作为小组或团队任务的一部分),符合考试委员会设定的技术报告要求,并由直接了解申请人工作的赞助商签署。可接受的报告类型包括:研究报告、分析(实验室)调查报告、建设项目报告(有关这些报告类型的更多信息,请参阅技术报告指南和要求)。在准备技术报告时,申请人应特别注意展示:
学术选择性入口测试(ASET)
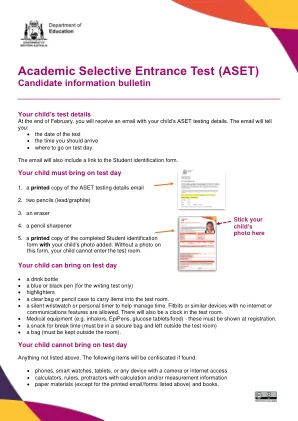
1。没有向其他学生讲话或发信号。请注意自己的工作。2。仔细听并按照所有说明。3。在告诉您这样做之前,请勿触摸或阅读桌子上的测试纸。4。测试时间结束后,即使您还没有完成,请立即停止工作。5。如果您有疑问,请举手,安静地等待主管提供帮助。6。不要将任何测试纸或测试信息从测试室中取出。

ASET 2024 国际学生科学海报大赛
国际学生科学海报竞赛是 2024 年科学与工程技术进步多场会议 (ASET'2024) 的一个非常重要的特色。目前就读于 HCT 和阿联酋、海湾合作委员会地区及国际上其他大学的本科或研究生工程课程(所有学科)的学生均有资格参加比赛。

数字资产转移中的婚姻夫妇的批准
摘要:在印尼法律和法规中,尚未对数字资产转让的配偶同意。与需要配偶同意的其他资产转让相比,这引发了有关本协议紧迫性的问题。这项研究是关于加密资产买卖计划的一种新形式,是印度尼西亚广泛交易的资产开发形式。实际上,买卖数字资产仍然使用数字平台,并且不接受配偶同意。使用的研究方法是一种具有描述性分析研究类型的教义研究方法。这项研究基于二级数据,通过文献研究与印度尼西亚的适用法律和法规结合使用。这项研究旨在了解印尼法律和法规中数字资产的存在以及需要印度尼西亚配偶同意以以数字资产形式应用对象的资产转让形式。基于研究结果,发现在购买和销售数字资产的配偶同意下,有法律真空,因此有必要进行监管,以调节联合财产法律法案中的配偶同意,以确保法律确定性和数字资产交易的有效性。
AI革命:机遇,挑战和前进的道路
组织团队教授(博士)Monika Arora,ABS(召集人)Rishi Manrai博士,协会。教授,ABS(召集人)Faraz Ahmad博士,助理。ABS(共同征收)教授Sanchita Ghosh博士,助理。 教授,ABS(共同召集人)博士 a.m. Jose,教授,ABS博士Paras Chawla博士,ASET教授兼主任Sunil Sikka博士,ASET教授,ASET博士Monica Kapuria博士,副教授,ABS Komal Tomar博士,市场营销总经理,营销ABS(共同征收)教授Sanchita Ghosh博士,助理。教授,ABS(共同召集人)a.m. Jose,教授,ABS博士Paras Chawla博士,ASET教授兼主任Sunil Sikka博士,ASET教授,ASET博士Monica Kapuria博士,副教授,ABS Komal Tomar博士,市场营销总经理,营销



教师E. Swathi指定助手的名字...
4。参加了MLR理工学院在2023年4月24日至29日组织的“大数据应用和安全挑战中的机器学习”的一周FDP。5。参加了由Nitttr,Chandigarh在10/10/2022至14/10/2022期间组织的一周在线FDP。6。参加了为期一周的在线FDP,该FDP在Nitttr,Chandigarh在01/08/2022至05/08/2022期间由Nitttr组织的“ MATLAB科学和工程老师”。7。参加了为期一周的在线FDP,介绍了“智能系统和机器的最新趋势和挑战(RTCISM)”由Amity工程技术学院(ASET),Amity University Patna组织,20122年1月8日至05/08/2022。8。参加了一周的在线FDP,介绍了Bhimavaram工程与技术研究所和Blackbuck Engineers Pvt Ltd的“人工智能新兴趋势”。9。在2022年5月16日至20日,参加了CBIT组织的“网络安全”的STTP。10。参加了一个40小时的在线计划“
全面回顾量子的影响...
Aryan Verma 1 , Gulshan Verma 2 , Er. Nisha Rathore 3 1. 学生(BCA 3rd),印度拉普尔阿米蒂大学 2. 学生(BCA 3rd),印度拉普尔阿米蒂大学 3. 助理教授(ASET),印度拉普尔阿米蒂大学 摘要:快速发展的量子计算领域有可能彻底改变包括网络安全在内的广泛领域。然而,由于它可能违反当前的加密标准,它也对数据安全构成了严重风险。为了缓解这些担忧,研究人员正在积极致力于构建量子机器学习和抗量子密码学。此外,电力系统、网络安全教育和电网安全都可以通过量子计算得到改善。为了塑造未来的网络安全和数字取证并为量子时代做好准备,一个涵盖法规和技术的综合计划至关重要。关键词 - 量子计算、网络安全、加密、抗量子密码学、物联网 (IoT) 安全、量子机器学习 (QML)