XiaoMi-AI文件搜索系统
World File Search Systemrobot
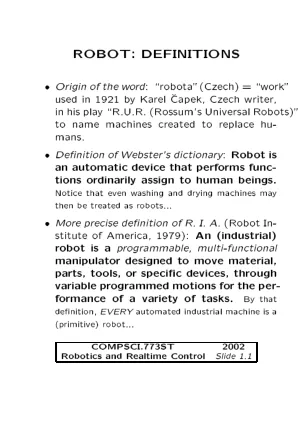
机器人规则
* 法学教授(已退休),曾任芝加哥肯特法学院院长。律师资格:弗吉尼亚州、宾夕法尼亚州(非活跃)、哥伦比亚特区、马里兰州、伊利诺伊州(非活跃)、美国最高法院。撰写了 100 多篇文章和 25 部书籍,涉及争议解决、技术与法律以及劳动法。商用直升机和私人仪表飞机飞行员。特级业余无线电爱好者 (K9KDF)。作者自 1980 年代中期以来一直关注人工智能的发展,并编写了一个专家系统来评估解雇员工的合法性。他曾担任美国行政会议的顾问,教授行政法,并撰写了许多关于监管新技术方面的文章。本文是关于法律和生成人工智能的五篇文章中的第四篇。第一篇,《机器人的版权?》(57 I ND . UL R EV . 139 (2023)),探讨了生成人工智能程序的输出是否有资格获得版权保护。第二篇文章《机器人作为海盗》(Robots as Pirates, 73 C ATH . UL R EV . ___ (2024))评估了生成人工智能程序对其学习数据库中的作品侵犯版权承担责任的可能性。第三篇文章《机器人诽谤者》(Robot Slanderers, 46 U. A RK . L ITTLE R OCK L. R EV . ___ (2024))考虑了根据生成人工智能系统输出中的事实陈述不实而导致的诽谤理论进行恢复的可能性。第五篇文章《机器人工作毁灭者》(Robot Job Destroyer, 84 LA. L. R EV . 207 (2023))评估了生成人工智能将取代大量员工的说法,并得出结论,这些可怕的预测被大大夸大了。

Robot Trajectron:基于轨迹预测的机器人操作共享控制
摘要 — 我们解决了以下问题:(a) 根据动作开始的几秒钟预测手臂伸展运动的轨迹;(b) 利用该预测器帮助操作员预测运动方向,从而减少操作员的认知负荷,从而促进共享控制操作任务。我们新颖的意图估计器称为 Robot Trajectron (RT),它根据机器人的近期位置、速度和加速度历史,生成机器人预期轨迹的概率表示。通过考虑手臂动力学,RT 可以比其他仅使用手臂位置的 SOTA 模型更好地捕捉操作员的意图,使其特别适合协助操作员意图易受变化的任务。我们推导出一种新颖的共享控制解决方案,将 RT 的预测能力与潜在到达目标位置的表示相结合。我们的实验证明了 RT 在意图估计和共享控制任务中的有效性。我们将在 https://gitlab.kuleuven.be/detry-lab/public/robot-trajectron 上公开提供支持我们实验的代码和数据
养老护理机器人 AI
女性 10.4% (27 位发言者) 40.3% (32 位发言者) +29.9% 男性 11.7% (25 位发言者) 61.3% (11 位发言者) +49.6% 平均值 11.0% 45.7% 34.7% 标准差 6.4% 16.8% 10.4%


机器人采用和盈利能力
1根据Internalainal组织的标准化组织(ISO)的定义ISO 8373,工业机器人是“由自动控制的,可重编程的,可重编程的,可将其重新编程的,可将其用于三个或更多轴的可编程的方法,可以在三个或更多的轴上使用,或者可以在工业中使用自动效应。我们的研究仅关注此定义下的工业机器人,尽管现在的机器人现在广泛地包括服务机器人,而工业机器人和服务机器人之间的界限越来越模糊。
机器人检查员手册
Inspection Checklist ...................................................................................................................................................... 7 Starting Configuration Inspection ................................................................................................................................ 7 Expansion Limit Inspection ........................................................................................................................................... 8 Robot Signs .................................................................................................................................................................... 9 Robot Safety Inspection ................................................................................................................................................ 9 Inspection Troubleshooting ....................................................................................................................................... 10 End of the Day ............................................................................................................................................................. 10

机器人接线指南
使用正确工具的适当工具将使接线任务更加容易,结果更可靠。下面是连接机器人所需的基本工具。如果您不制作自己的自定义电缆和连接器,则可能需要的唯一工具是一对剪子狙击手或对角线切割器。这些对于修剪拉链领带很有用。修剪良好的拉链扎带表现出尖锐的点,可能是危险。在更改或重新进行压接连接时,您将需要一对钢丝脱衣舞娘,可能是专用的压接工具。钢丝脱衣舞夹可让您从不同的金属丝仪上剥离绝缘材料,同时确保没有切割任何铜线。通用压接工具适用于常见的铲片,但是对于定制的连接器(如安德森电线杆),可能需要专用的压接器。在缩短或延长电线时,或制作电动机总线时,焊接铁和热枪是有用的工具。用于电子产品,建议使用温度控制的铁,并且可以将小型枪用于典型的直径收缩。运行多条电线(如几条伺服电线)时,将简单的标签应用于插入的点。这些可以像胶带上折叠在电线上并用Sharpie命名一样简单。

多功能军事机器人
该项目介绍了多功能军事机器人的开发,这是一种多功能机器人系统,旨在执行各种防御和安全任务。机器人的架构结合了移动性,高级传感器,健壮的控制系统和安全的通信接口,使其适应了各种操作方案。该项目的目标是增强军事力量的能力,降低人类人员的风险并满足各种任务要求。设计过程始于特定目标和要求的定义,从而导致概念设计,其中包括移动性,传感器放置和通信功能的考虑。组件和技术是仔细选择的,以确保机器人执行监视,侦察和炸弹处置等任务的能力。软件开发的重点是导航算法,避免障碍物和安全措施,包括加密。机器人组装,严格测试并校准,以确保准确的传感器读数和可靠的操作。安全协议是为人类操作员和旁观者建立的,而用户友好的遥控界面旨在促进操作。该项目强调对人员的培训和创建部署程序。在实际情况下进行操作测试是为了评估机器人的性能,并持续承诺基于用户和运营商的反馈来进行完善和增强。该项目还涉及遵守与使用军事机器人有关的国际法律和道德考虑。