
机构名称:
¥ 1.0
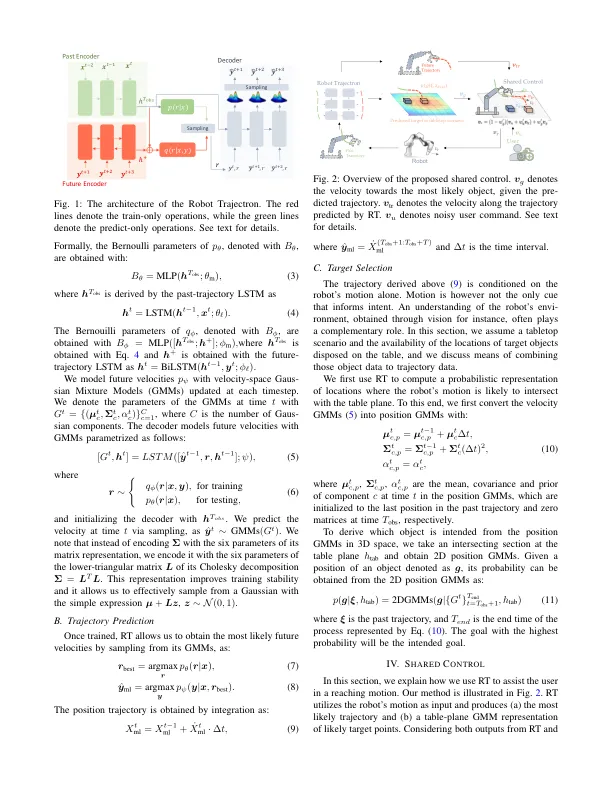
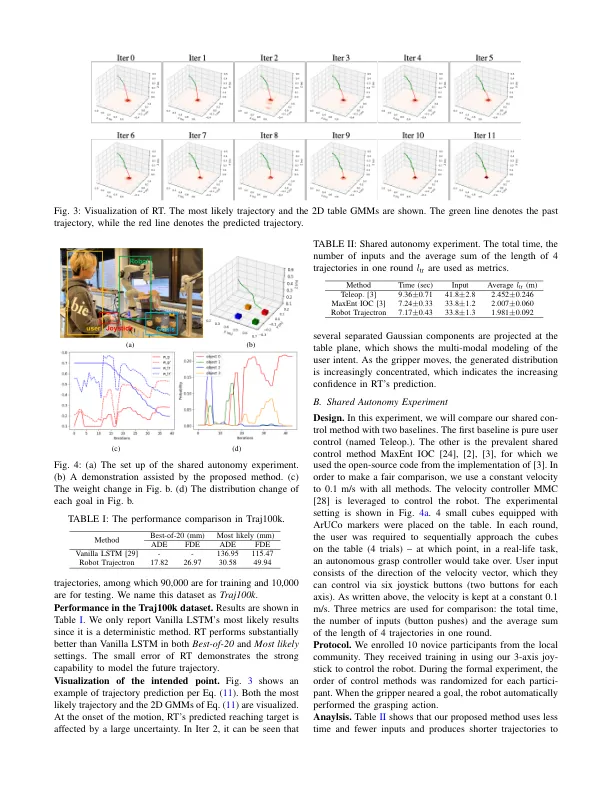
摘要 — 我们解决了以下问题:(a) 根据动作开始的几秒钟预测手臂伸展运动的轨迹;(b) 利用该预测器帮助操作员预测运动方向,从而减少操作员的认知负荷,从而促进共享控制操作任务。我们新颖的意图估计器称为 Robot Trajectron (RT),它根据机器人的近期位置、速度和加速度历史,生成机器人预期轨迹的概率表示。通过考虑手臂动力学,RT 可以比其他仅使用手臂位置的 SOTA 模型更好地捕捉操作员的意图,使其特别适合协助操作员意图易受变化的任务。我们推导出一种新颖的共享控制解决方案,将 RT 的预测能力与潜在到达目标位置的表示相结合。我们的实验证明了 RT 在意图估计和共享控制任务中的有效性。我们将在 https://gitlab.kuleuven.be/detry-lab/public/robot-trajectron 上公开提供支持我们实验的代码和数据
Robot Trajectron:基于轨迹预测的机器人操作共享控制
主要关键词



相关文件推荐























