机构名称:
¥ 2.0
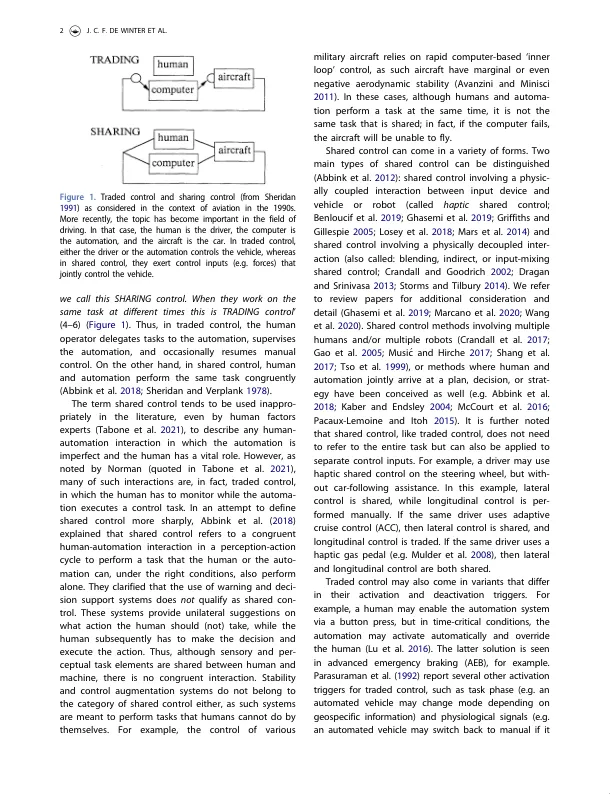
摘要 人机交互中的一个主要问题是任务应该在人与自动化之间进行交换还是共享。这项工作展示了作者在过去 10 年中通过课堂辩论对这两种人机交互形式的反思,重点关注自动驾驶领域。与讲座一样,我们首先从历史角度调查自动化的六个缺陷开始:(1)丧失情境和模式意识,(2)技能退化,(3)不平衡的心理工作量,(4)行为适应,(5)误用,和(6)废用。接下来,其中一位作者解释了为什么他认为触觉共享控制可以弥补这些缺陷。接下来,另一位作者反驳了这些论点,认为交换控制是改善道路安全的最有希望的方法。本文以一个共同点结束,解释了共享控制和交易控制分别在中等和低环境复杂性下表现优于对方。
驾驶中的共享控制与交易控制 - NLR
主要关键词


相关文件推荐