XiaoMi-AI文件搜索系统
World File Search Systemrobot

gateKEEPER AI 接待机器人
在 SouthBay,我们生产定制医疗和半导体部件。作为一家重要的硅谷公司,我们需要最好的产品来确保员工安全,公司保持有效运营。Covid-19 带来了一些重大挑战,mAIrobotics 是一家轻松赢得我们业务的公司。确保每个人的体温合格是绝对的要求,但确保每天每个班次的每个人的体温良好需要花费太多时间和精力。在评估了几种产品后,mAIrobotics 显然是赢家。他们不仅拥有一款能够准确高效地捕获温度的出色产品;能够立即从任何浏览器在 Google Cloud 上安全地查看和操作记录是一种非常好的体验。界面快速、流畅、安全、现代且摩擦通常很低,就像我们对正确的 UI/UX 设计所期望的那样。但真正让我们折服的是始终如一、快速的客户服务,它满足了我们的所有需求,确保产品满足了我们想要的一切。mAIrobotics 是一个轻松的选择,它让我们的生活变得更好。谢谢 mAIrobotics!

人工智能驱动的自主机器人...
精准农业,更具体地说是精准耕作,涉及使用现代信息和通信技术,旨在提高作物产量和盈利能力。同时,精准农业导致种植作物所需的投资和资源(耕地、水、肥料、除草剂、杀虫剂等)总体减少。精准农业领域使用的一些技术包括在线天气预报、传感器系统和网络、卫星系统、NDVI 和摄影系统、杂草检测系统等。这些解决方案提供的信息需要进行分析,然后才能产生农艺建议或说明,但通过这种方式,精准农业可以为农民提供有关所需资源的知识,以及应在何时和多少时间使用这些资源的信息。及时提供农艺建议是提高产量和质量的关键因素。但是,这些建议通常涉及或要求采取特定行动。当然,农民不必亲自或手动执行这些活动 - 他们可以使用机器人和移动自主系统(Krastev 和 Georgiev,2015 年)。使用机器人进行精准农业并不是一个新趋势。几十年来,精准农业机器人一直在发展和升级,其现代版本更加智能,可以使用不同的输入参数自行做出决策(Amer 等人,2015 年)。

多用途军用间谍机器人...
开发这种机器人的主要目的是监视战场区域的人类活动,以减少敌方的渗透。机器人配有摄像头,可以传输战场视频,以防止对人员生命造成任何损害。机器人配有金属探测器和气体探测器,用于防止战场受损。移动机器人配有合适的传感器和摄像头,可执行不同的任务,可远程操作侦察巡逻,并将视频图像传回操作员。如今,安卓智能手机是最流行的小工具。网络上有多个应用程序利用这些手机的内置硬件,如蓝牙、GPS 技术来控制其他设备。所提出的系统设计了一个机器人,可以使用在安卓手机上运行的应用程序进行控制。根据从安卓收到的命令,机器人的运动通常受到控制。因此可以采取所需的行动。

人机交互 - CiteSeerX
人机交互 (HRI) 最近受到了学术界、实验室、科技公司和媒体的广泛关注。鉴于这种关注,有必要对 HRI 进行综述,以便为该领域以外的人提供指导,并促进该领域内对 HRI 统一愿景的讨论。本综述的目标是对 HRI 相关问题进行统一处理,确定关键主题,并讨论可能在不久的将来影响该领域的挑战性问题。尽管本综述遵循综述结构,但呈现 HRI 连贯“故事”的目标是意味着必然有一些写得好、有趣且有影响力的论文未被引用。我们不会试图综述每篇论文,而是从多个角度描述 HRI 的故事,以期确定跨应用的主题。这项调查试图纳入代表大学、政府努力、行业实验室和对 HRI 做出贡献的国家的公平横截面的论文,以及对该领域做出贡献的学科的横截面,例如人类、因素、机器人、认知心理学和设计。
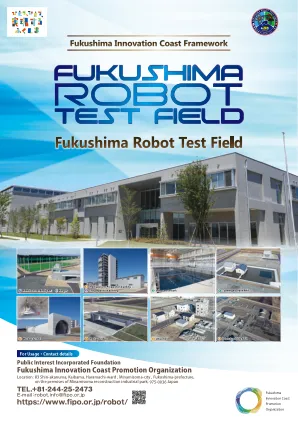
福岛机器人试验场
福岛机器人试验场(RTF)是根据福岛创新海岸框架开发的,是世界上最大的研发基地之一。在这个研究基地,可以进行验证测试、性能评估和操作培训,同时重现实际操作条件,主要针对预计将用于物流、基础设施检查和大规模灾难的地面、海上、水下和空中机器人。RTF 于 2020 年 3 月开放。它有两个场地,即南相马场地和浪江场地。南相马场地在南相马市的重建工业园区内拥有无人机设施、基础设施检查和灾难响应机器人设施、水下和海上机器人设施以及开发基地设施。场地大小约为东西 1000 米,南北约 500 米。浪江场地在浪江町 Tanashio 工业园区有一条跑道和一个机库。南相马场地和浪江场地之间可以进行长距离飞行测试。 2021年世界机器人峰会基础设施及灾害应对项目大赛在该基地举办。

反无人机系统机器人
II. 方法论 该系统旨在对抗微型无人机。无人机被激光摧毁。近年来,无人机得到了巨大的发展。由于价格低廉和易于使用,无人机已广泛应用于许多应用场景,这可能对公共安全和个人隐私构成巨大威胁。为了减轻这些威胁,有必要在敏感区域部署反无人机系统,以检测、定位和防御入侵的无人机。反无人机系统在很大程度上依赖于射频技术来检测和跟踪无人机等无人驾驶飞行器 (UAV)。这些设备还可以阻止敌方无人机,使它们无法检索信息。在我们的项目中,有解决这些问题的方法。随着此类无人机袭击的频率增加,这是不对称战争的一个分水岭,并强调武装部队需要建立威慑、检测和消除此类空中威胁的能力。最具威胁性的方面是使用无人机群来瞄准特定的关键设施——军事或非军事资产。我们的系统是反无人机系统,我们可以借助激光攻击敌人,从而挫败敌人的计划。在拟议的系统中,有一个雷达可以探测无人机,还有运动传感器可以探测动物、鸟类、人类等生物。小型无人机已被用来攻击国家行为者。随后必须部署反无人机技术作为应对这一威胁的对策,并确保我们能够检测到这种风险。非国家行为者使用无人机技术代表着恐怖分子作案手法的重大转变。随着此类威胁的增加,反无人机的新市场正在不断增长。拟议的系统在保护关键基础设施、事件和敏感区域免受未经授权的无人机活动侵害方面表现出极佳的灵敏度。反无人机系统用于检测和拦截不受欢迎的无人机和无人驾驶飞行器 (UAV)。

机器人运动的量子规划器
摘要:将量子计算集成到传统系统中似乎是大幅提高人工智能系统性能的可行途径。这种处理的一个例子是实施采用量子计算的远程反应系统。在这项工作中,我们考虑了机器人在决策来自量子算法的环境中导航。具体来说,机器人的行为是通过生产系统形式化的。它用于描述世界、它可以执行的动作以及机器人行为的条件。根据生产规则,机器人活动的规划在识别-行动循环中使用量子规则处理算法进行处理。这样的系统旨在实现显着的计算加速。
机器人自治的原则II
•https://cs237b.stanford.edu(课程内容和公告)•https://edstem.org/us/courses/70929/discussion(课程 - 重述讨论)•https://wwwwwwwwwwwwwwwwwwwwwww.gradescope.com.com./courses/courses/9337666681(HW3376681) https://canvas.stanford.edu/courses/200657(Panopto课程视频)•要联系教学人员,请使用电子邮件:CS237B-WIN2425-

智能农药喷雾器机器人
技术进步彻底改变了自动农药喷雾剂,从而提高了效率,精度和可持续性。GPS指南和自动驱动系统可实现准确的导航和覆盖范围,最大程度地减少重叠并确保没有错过的区域。可变速率技术允许根据土壤类型和作物健康等因素应用不同的农药量,从而优化使用并减少环境影响。传感器集成,例如杂草检测和作物高度传感器,可实现特定地点应用,进一步最大程度地减少废物。无人机技术在具有挑战性的地形和高价值作物中提供了精确的应用,而人工智能和机器学习算法分析了数据,以优化喷雾模式,预测暴发并提高整体效率。这些进步通过减少农药使用,最大程度地降低环境影响并提高农业生产力来有助于更可持续和有效的害虫管理实践。

AI动力清洁机器人
1圣雄甘地技术学院信息技术系教授2,3,4,圣雄甘地技术学院信息技术系学生摘要商业自动清洁机器人,如今很普遍。 但是,可以在自主和远程控制的同时可以清洁和拖把的机器人非常昂贵。 最近,人们对使用人工智能(AI)和物联网(IoT)(IoT)的兴趣越来越浓厚,以改善日常生活的各个方面。 这样的领域是家庭计算机化,尤其是在清洁任务的领域。 此任务建议开发带有超声传感器的基于智能的清洁机器人,并由IoT平台Nodemcu和AI计算控制。 机器人自动导航室内空间,使用气体传感器检测有害气体,并使用AI和机器学习算法进行清洁。 NodeMCU IoT平台允许用户远程监控空气质量并控制机器人的操作。 气体感应,人工智能,机器学习和物联网功能的结合为室内空气污染管理提供了积极的解决方案,从而带来了更健康,更安全的室内环境。 此外,与ThingsPeak等云平台的集成允许进行远程监视和预测性维护。 在实施和测试该原型后,观察到机器人可以按编程工作,并且配备了家庭商业最先进的清洁机器人的大多数功能。 地板清洁剂多年来都在发展。1圣雄甘地技术学院信息技术系教授2,3,4,圣雄甘地技术学院信息技术系学生摘要商业自动清洁机器人,如今很普遍。但是,可以在自主和远程控制的同时可以清洁和拖把的机器人非常昂贵。最近,人们对使用人工智能(AI)和物联网(IoT)(IoT)的兴趣越来越浓厚,以改善日常生活的各个方面。这样的领域是家庭计算机化,尤其是在清洁任务的领域。此任务建议开发带有超声传感器的基于智能的清洁机器人,并由IoT平台Nodemcu和AI计算控制。机器人自动导航室内空间,使用气体传感器检测有害气体,并使用AI和机器学习算法进行清洁。NodeMCU IoT平台允许用户远程监控空气质量并控制机器人的操作。气体感应,人工智能,机器学习和物联网功能的结合为室内空气污染管理提供了积极的解决方案,从而带来了更健康,更安全的室内环境。此外,与ThingsPeak等云平台的集成允许进行远程监视和预测性维护。在实施和测试该原型后,观察到机器人可以按编程工作,并且配备了家庭商业最先进的清洁机器人的大多数功能。地板清洁剂多年来都在发展。关键字:Nodemcu,自动清洁机器人,空气污染管理1。简介自动层清洁机器人现在在市场上很常见。这些技术设备旨在在没有任何人类干预的情况下运行。此外,这些设备已编程,以便按时并精确地完成任务。这些设备,从真空吸尘器到具有真空和拖把功能的自动层清洁器,还包括导航和控制应用程序。商业产品,例如Roomba Irobot,Samsung Jetbot,Ecovacs Ozmo,Eufy Robovac等。由于成本高昂,许多家庭,尤其是在较低的社会经济阶层中的家庭负担不起。我们的项目旨在通过提出清洁和拖把机器人的工作原型来缩小这一差距,该原型最终可以将其发展为低成本机器人,并具有商业机器人提供的大多数功能。最近已经进行了几项研究以开发这些类型的机器人。研究人员尝试了尖端的微控制器。拟议中的人类制作的基于情报的清洁机器人使用超声波传感器来检测障碍物并在其当前情况下导航。这些传感器提供了有关机器人环境的持续信息,从而使其能够做出明智的清洁决策。使用nodemcu平台,机器人可以连接到