XiaoMi-AI文件搜索系统
World File Search System中学
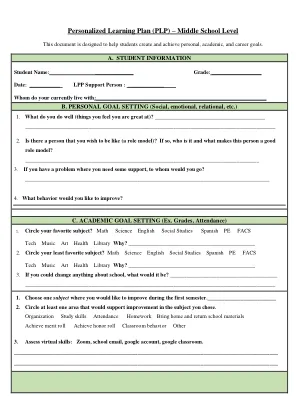
个性化学习计划 - 中学
获得优异成绩 获得荣誉榜 课堂行为 其他 3. 评估虚拟技能:Zoom、学校电子邮件、谷歌帐户、谷歌课堂。 ________________________________________________________________________________________________ ________________________________________________________________________________________________

发展中国家的中学科学
这里是主要观点。对于科学素养高的民众能够多大程度上重塑任何给定社会的期望往往过于乐观。确实,当今人类面临的许多问题只有通过具有科学和技术知识的公民的积极参与才能解决。农业、卫生、营养、人口控制、环境管理和工业发展是一些更广泛地了解科学和技术将导致更明智决策的领域。然而,当国家在科学教育上投入的财政资源有限,而其影响却低于预期 - 或实现速度较慢 - 那么可能会出现反对科学教育的反冲,其方向与当前趋势的积极方向一样消极。这条评论并不意味着高质量的科学教育对所有国家的所有学生都至关重要。这只是一个警告——呼吁现实行动

2024年9月中学通讯
社交媒体如此令人上瘾并让我们的孩子一直沉迷于手机的原因有很多:社交媒体通过点赞和评论提供即时反馈,让他们感受到社会认可和认同。社交媒体上展示的最新趋势让年轻人害怕错过。这增加了他们不断查看动态的动力。每一个通知或积极的互动都会触发多巴胺的释放,这是一种让人感觉良好的荷尔蒙。

1965年的基础和中学教育法[AS ...
第2部分 - 其他规定。8521。维持努力。sec。8522。关于国家援助的禁令。sec。8523。评估结果的隐私。sec。8524。学校祈祷。sec。8525。平等进入公立学校设施。sec。8526。禁止使用资金秒。8526a。禁止反对联邦授权,指示或控制。sec。8527。禁止联邦政府和使用联邦资金。sec。8528。武装部队招聘人员访问学生和学生招募信息。sec。8529。禁止联邦赞助的测试。sec。8530。针对教师,校长或其他学校领导者的国家测试或认证的限制。sec。8530a。禁止要求国家参与。sec。8531。禁止全国数据库。sec。8532。不安全的学校选择选项。sec。8533。禁止歧视。sec。8534。公民权利。
中学 - 指南 - 粮农组织知识库
家畜的改良以满足人类的需求取决于遗传变异——既包括品种内的变异,也包括品种间的变异。遗传变异是动物育种者的基本材料。正是这种变异被用来塑造我们的家畜物种以满足我们的需求,而变异的丧失将限制满足不可预测的未来需求的可用选项。虽然品种内变异的丧失不断通过引入新的变异来抵消(Franklin,1981;Hill 和 Keightley,1988),但以品种间差异形式出现的遗传变异无法轻易再生。每个品种或品系都是突变和遗传漂变的产物,也是单独的适应和进化的产物,通常经过许多世纪,气候、地方性寄生虫和疾病、可用营养和人类强加的标准施加了不同的选择压力。因此,每个品种都包含一组独特的基因。

中学工程技术教育标准
A1 运用有效的口头和非口头沟通技巧 A2 参与对话、讨论和小组演示 A3 查找和解释书面信息 A4 识别相关的细节、事实和规格 A5 准确完整地记录信息 A6 展示使用正确词汇、拼写、语法和标点符号组织、写作和编辑的能力 A7 展示清晰简洁的写作能力 A8 运用有效的决策技巧 A9 执行基本和高级数学运算(例如,加、减、乘、除、小数、分数、转换单位、平均值、百分比、比例、比率) A10 使用表格、图形、图表和图表获取或传达信息 A11 识别预算的组成部分及其创建方式 A12 设定个人财务目标并制定实现目标的计划 A13 识别和应用互联网安全实践(例如,密码安全、登录、注销、注销、锁定计算机) A14 适当使用技术来增强任务 A15 在使用电子通信时展示适当的礼仪(例如,手机、电子邮件、电话会议)
发展中国家的中学科学
此处的重点在于,人们往往过于乐观,认为科学素养水平高的民众能够改变任何既定的社会。的确,当今人类面临的许多问题只有通过科学和技术知识丰富的公民的积极参与才能解决。农业、卫生、营养、人口控制、环境管理和工业发展是一些领域,在这些领域中,对科学技术的更广泛了解将导致更明智的决策。然而,当国家在科学教育上投入的财政资源有限,而其影响却低于预期——或者实现速度较慢——那么,可能会出现与当前积极趋势一样消极的反对科学教育的反弹。这一评论并不意味着高质量的科学教育对所有国家的所有学生都至关重要。这只是一个警告——呼吁现实的行动。
发展中国家的中学科学
此处的重点在于,人们往往过于乐观,认为科学素养水平高的民众能够改变任何既定的社会。的确,当今人类面临的许多问题只有通过科学和技术知识丰富的公民的积极参与才能解决。农业、卫生、营养、人口控制、环境管理和工业发展是一些领域,在这些领域中,对科学技术的更广泛了解将导致更明智的决策。然而,当国家在科学教育上投入的财政资源有限,而其影响却低于预期——或者实现速度较慢——那么,可能会出现与当前积极趋势一样消极的反对科学教育的反弹。这一评论并不意味着高质量的科学教育对所有国家的所有学生都至关重要。这只是一个警告——呼吁现实的行动。