XiaoMi-AI文件搜索系统
World File Search System反作用

反作用轮 VRW-D-6
轮子速度由运行在 32 位微处理器中的模型支持的 PI 环路控制,该微处理器在功率级使用低噪声高效四象限 PWM 方法。轮驱动电子设备包括热保护和过压保护电路。信号接口是 RS422/RS485 级别的标准异步 SCI。它可用于单全双工配置以及半双工总线架构。波特率可调至 1Mbaud。还提供冗余 CAN 总线接口。反作用轮设计保持模块化。通过改变转子几何形状、输入电压范围或通信协议,VRW 特性很容易适应客户需求。可以在扭矩控制模式或速度控制模式下灵活操作。这种反作用轮的标称在轨寿命超过 45,000 小时。

反作用轮发射锁定系统
摘要 发射载荷是有效载荷的关键力。许多结构并非为承受这些载荷而设计的,因此需要额外的系统来吸收这些载荷。这些发射锁定机制有多种类型。对于未来的磁轴承反作用轮,开发并测试了两种不同原理的发射锁定机制概念。第一种基于弹簧机构,而第二种使用电磁来移动锁定销。对两者的原型进行了首次测试以评估其功能性。随后,在设计中加入了关于减轻质量和结构体积的改进。在此过程中,使用 PLA 长丝的增材制造已用于研究这些机制的可能应用。弹簧概念比电磁概念更可靠,但需要阻尼机制。使用增材制造的 PLA 组件是生产的一种有希望的可能性。
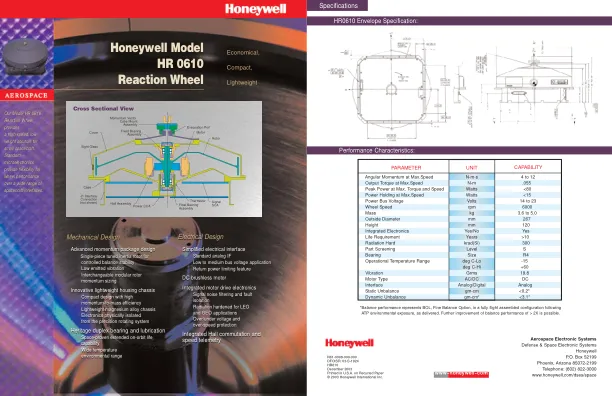
霍尼韦尔 HR 0610 型反作用轮
最大速度下的角动量 Nms 4 至 12 最大速度下的输出扭矩 Nm .055 最大扭矩和速度下的峰值功率 瓦 <80 最大速度下的功率保持 瓦 <15 电源总线电压 伏 14 至 23 轮毂速度 rpm 6000 质量 kg 3.6 至 5.0 外径 mm 267 高度 mm 120 集成电子元件 是/否 是 寿命要求 年 >10 辐射硬度 krad(Si) 300 零件筛选等级 S 轴承尺寸 R4 工作温度范围 摄氏度-低度 -15 摄氏度-高度 +60 振动 Grms 19.8 电机类型 交流/直流 直流 接口 模拟/数字 模拟 静态不平衡 gm-cm <0.2* 动态不平衡 gm-cm 2 <3.1*

存在反作用时混沌与关联特性的全息研究
在本研究中,我们进行了全息研究,以估计反作用对形成热场双态 (TFD) 的两个子系统之间的相关性的影响。每个子系统都被描述为强耦合的大 N c 热场理论,而赋予它的反作用则源于均匀分布的重静态夸克。我们在此考虑的 TFD 状态全息地对应于两个 AdS 黑洞的纠缠态,每个黑洞都由均匀分布的静态弦变形。为了在存在反作用的情况下对两个纠缠边界场理论之间的相关性进行全息估计,我们计算了反作用永恒黑洞中的全息互信息。早期扰动的后期指数增长是边界热场理论中混沌的标志。利用对偶体积理论中的冲击波分析,我们通过计算全息蝴蝶速度来表征这种混沌行为。我们发现,由于依赖于反作用参数的修正项,蝴蝶速度有所降低。早期扰动的后期指数增长会破坏双边关联,而反作用总是有利于双边关联。最后,我们计算了纠缠速度,它本质上编码了两个边界理论之间关联的破坏率。

使用芯片级探测器实现高效、低反作用量子测量
1 科罗拉多大学 JILA,美国科罗拉多州博尔德 80309 2 科罗拉多大学物理系,美国科罗拉多州博尔德 80309 3 美国国家标准与技术研究所,美国科罗拉多州博尔德 80305 4 奥地利科学院量子光学与量子信息研究所,奥地利因斯布鲁克 A-6020 5 因斯布鲁克大学实验物理研究所,奥地利因斯布鲁克 A-6020 6 伊利诺伊大学厄巴纳-香槟分校数学系和伊利诺伊量子信息科学与技术中心,伊利诺伊州厄巴纳 61801,美国 7 科罗拉多大学量子物质理论中心,美国科罗拉多州博尔德 80309 8 耶鲁大学应用物理系,美国康涅狄格州纽黑文 06511 9 物理科学实验室,美国马里兰州学院公园 20740


关于结构全尺寸试验中界面载荷的测量
为了进行这项测试,我们建造了一个反作用结构来支撑右侧机翼,ILEF 测试件就安装在机翼上。我们设计了一组模拟机身舱壁的凸耳,直接与内翼根凸耳连接。这些定制凸耳上装有应变计,目的是估算与反作用结构连接处的负载分布。在最终安装到反作用结构上之前,我们在负载框架中对它们进行了单独校准,并施加了垂直和水平负载。本文重点介绍了选择仪表位置和方向的技术、校准程序和数据分析。最后,我们讨论了从这个项目中学到的一些经验教训。
专利局官方期刊 - rsmdacc
(57) 摘要:公开了一种具有基于齿轮的多电机单反作用轮系统的姿态控制系统 (ACS) (102),用于自主控制执行器故障。基于齿轮的系统包括锥齿轮组件 (202)、至少一个反作用轮 (204) 和多个电机 (206A-N)。锥齿轮组件 (202) 包括主齿轮 (402) 和多个中间齿轮 (302A-N)。多个中间齿轮 (302A-N) 对称地连接到主齿轮 (402)。至少一个反作用轮 (204) 机械地连接到主齿轮 (402)。多个电机 (206A-N) 机械地连接到多个中间齿轮 (302A-N)。 ACS(102)向连接到至少一个反作用轮(204)的第一电机(206A)发送测试信号,以确定第一电机(206A)是否处于健康状态。当确定第一电机(206A)不健康时,ACS(102)向第二电机(206B)发送测试信号。

马来西亚小型遥感卫星
- 基于 4 个(反作用轮)的 3 轴稳定 - 指向精度:< 0.2º (2σ) - 指向知识:1 弧分 (2σ) - 姿态感应:航向太阳传感器、精细太阳传感器、磁力计、星传感器、陀螺仪
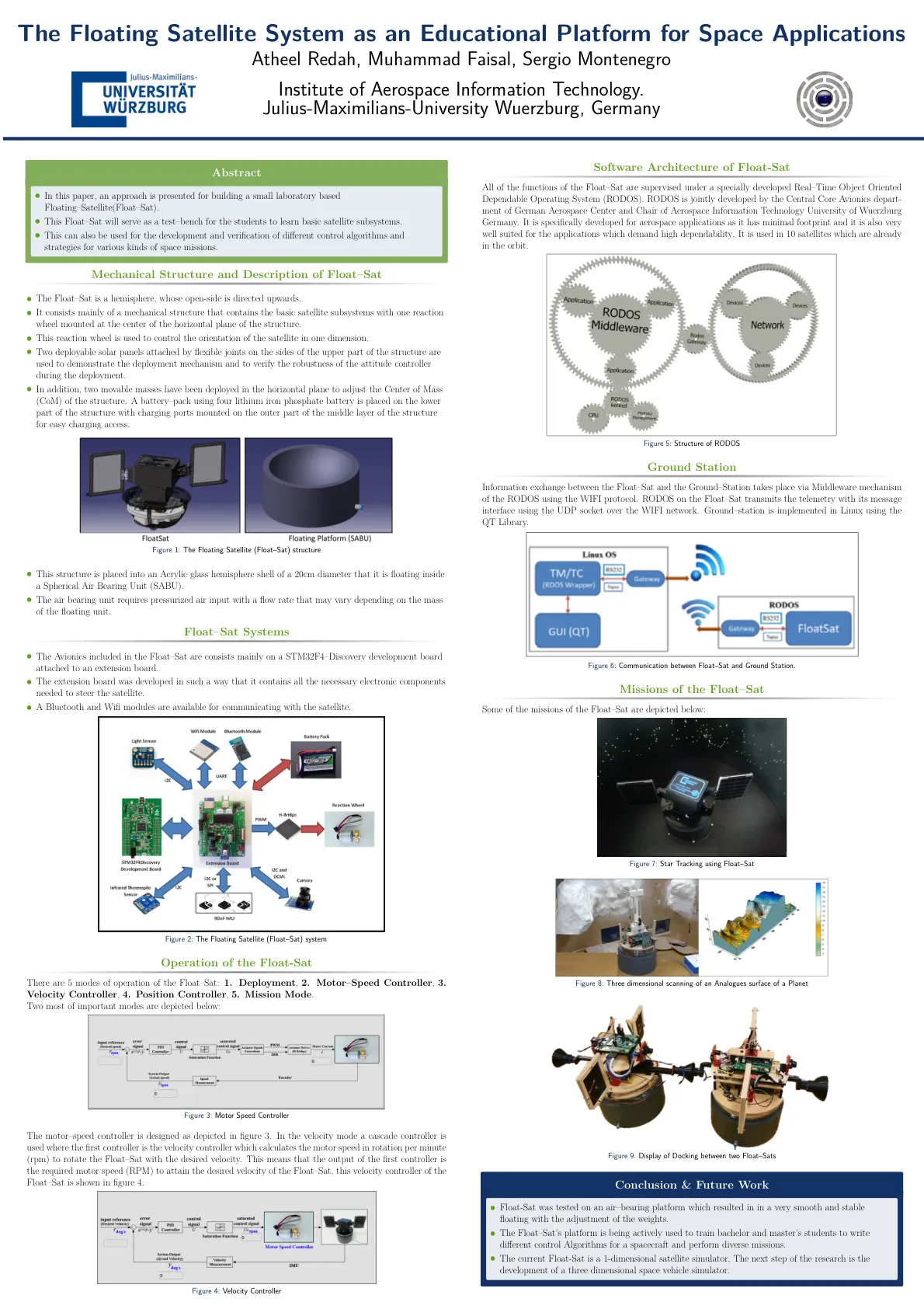
浮动卫星系统作为太空应用教育平台
• Float–Sat 是一个半球形,其开口面朝上。• 它主要由一个机械结构组成,该结构包含基本的卫星子系统,一个反作用轮安装在结构水平面的中心。• 该反作用轮用于在一个维度上控制卫星的方向。• 两个可展开的太阳能电池板通过柔性接头固定在结构上部两侧,用于演示展开机制并验证姿态控制器在展开过程中的稳健性。• 此外,两个可移动质量已在水平面上部署,以调整结构的质心 (CoM)。使用四个磷酸铁锂电池的电池组放置在结构的下部,充电端口安装在结构中间层的外侧,方便充电。