XiaoMi-AI文件搜索系统
World File Search System飞行器

无人驾驶飞行器的实验验证以调整...
Pedro L. Jimenez*、Jorge A. Silva** 和 Juan S. Hernandez*** *副教授 Universidad de San Buenaventura,Cr 8H N° 172 - 20 波哥大 - 哥伦比亚 **研究助理 Universidad de San Buenaventura,Cr 8H N° 172 - 20 波哥大 - 哥伦比亚 ***研究助理 Universidad de San Buenaventura,Cr 8H N° 172 - 20 波哥大 - 哥伦比亚 摘要 本文介绍了用于短程和固定翼无人机的开源和低成本自动驾驶仪的实验验证,以确定使用扩展卡尔曼滤波器 (EKF) 和总能量控制系统 (TECS) 进行姿态、速度和高度调整的模型飞机的 PID 控制器的标准调整方法。第一步是分析在实验飞行和硬件在环 (HIL) 仿真接口中获得的数据,然后将遥测数据与模型飞机飞行动力学进行比较,以验证自动飞行控制。最后,实现 PID 控制器的自动调谐,以在未来无人驾驶飞行器的发展中建立新方法。

先进高空飞行器 (AHAB)
新墨西哥州立大学 - 先进高空气体 (AHAB) Peter Lobner,2022 年 3 月 10 日更新 21 世纪初,新墨西哥州立大学物理科学实验室正在开发先进高空气体 (AHAB),这是一种太阳能驱动、非刚性、氦超压、空气动力学飞艇,旨在展示可变浮力推进。这种推进方式首次在 1863 年得到展示,当时所罗门·安德鲁斯博士首次驾驶充满氢气的 Aereon 飞艇飞越新泽西州珀斯安博伊。20 世纪 60 年代初,Aereon 公司(与安德鲁斯博士无关)建造了 Aereon III 混合飞艇,该飞艇设计为仅使用可变浮力推进即可飞行。Aereon III 在 1966 年的滑行测试中严重受损,从未有机会展示其可变浮力推进能力。改变飞艇的浮力可以使其爬升或下降。与所罗门·安德鲁斯的 Aereon 一样,AHAB 的设计目的是在重复的跳跃飞行剖面中每次爬升或下降时产生向前的推进力。凭借这种适度的推进能力,AHAB 被设计用于近太空(非常高的高度)的驻留操作,而螺旋桨在这种环境中是无效的。AHAB 飞艇的整体浮力通过内部气囊进行调整。当准备好飞行时,飞艇具有正浮力,并且空气体中的氦超压会压缩气囊。当飞艇滑翔上升时,可以打开排气阀释放气囊中剩余的空气,使未压载的飞行器达到其最大高度(压力高度)。为了过渡到滑翔下降,鼓风机将环境空气泵入气囊,增加飞艇的重量,直到其产生负浮力。通过将气囊排入大气,即可终止下降。


自主飞行器首飞成功...
和训练有素的瑜伽教练简要介绍了瑜伽及其益处。在经验丰富的从业者的指导下,进行了瑜伽练习、冥想和各种体式练习。计划分两节进行。上午的课程由 NSTL 的官员和工作人员以及 NSTL 兄弟会的家庭成员参加。NSTL 主任 Y Srinivasa Rao 博士和 50 名成员积极参与并执行了常见的瑜伽协议。来自 Ramakrishna Mutt 和 Ramakrishna Mission 的僧侣 Swami Maharaj Bodhamayanandha 还就“健康心灵,健康国家”进行了讲座。他祝福 NSTL 兄弟会并发表了关于“健康心灵,健康国家”的非常有启发性的演讲,并与参与者进行了互动,并解释了瑜伽和日常活动生活的各个身体、心理和精神方面。NSTL,维沙卡帕特南

微型飞行器的气动流动特性
实验设置................................................................................................................60 载荷数据................................................................................................................62 载荷数据讨论....................................................................................................62 振动探索.................................................................................................................64 感兴趣的 AOA 的选择................................................................................................66
可重复使用的轨道转移飞行器
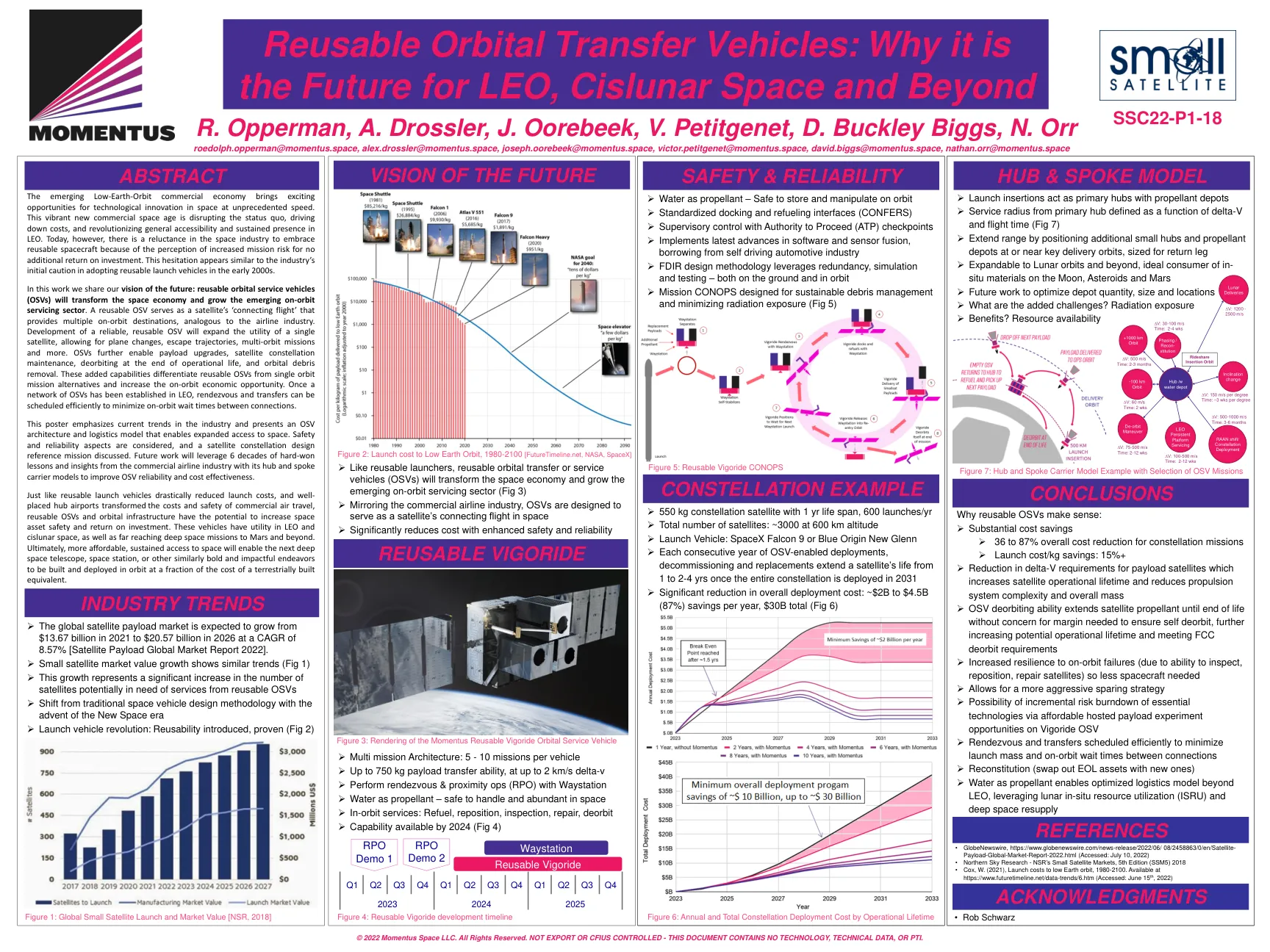
在这项工作中,我们分享了我们对未来的愿景:可重复使用的轨道服务飞行器(OSV)将改变太空经济并发展新兴的在轨服务行业。可重复使用的 OSV 充当卫星的“中转航班”,提供多个在轨目的地,类似于航空业。开发可靠的可重复使用的 OSV 将扩大单颗卫星的效用,允许更换平面、逃逸轨迹、多轨道任务等。OSV 进一步实现有效载荷升级、卫星星座维护、使用寿命结束时脱轨以及轨道碎片清除。这些附加功能将可重复使用的 OSV 与单轨道任务替代方案区分开来,并增加了在轨经济机会。一旦在低地球轨道建立了 OSV 网络,就可以有效地安排会合和转移,以最大限度地减少连接之间的在轨等待时间。

航空航天飞行器的制导与控制
1. 介绍导航、制导和控制的概念 2. 熟悉航空航天飞行器的各种制导和控制方式 3. 学生还可通过设计飞行控制系统来学习实现的动态目标。 4. 熟悉火箭和导弹的控制原理 5. 深入了解航天器的机动 课程成果:

使用基于事件的微型飞行器垂直着陆......
小型飞行机器人可以通过保持恒定的发散度,利用仿生光流进行着陆动作。但是,光流通常是根据标准微型摄像机记录的帧序列估算出来的。这需要在机上处理完整图像,限制发散度测量的更新率,从而限制控制回路和机器人的速度。基于事件的摄像机通过仅以微秒时间精度测量像素级亮度变化来克服这些限制,从而为光流估计提供了一种有效的机制。据我们所知,本文首次将基于事件的光流估计集成到飞行机器人的控制回路中。我们扩展了现有的“局部平面拟合”算法,以获得改进的、计算效率更高的光流估计方法,该方法适用于各种光流速度。该方法已针对真实事件序列进行了验证。此外,介绍了一种基于事件的光流估计发散的方法,该方法考虑了孔径问题。开发的算法在四旋翼飞行器上的恒定发散着陆控制器中实现。实验表明,使用基于事件的光流,可以在很宽的速度范围内获得准确的发散估计。这使四旋翼飞行器能够执行非常快速的着陆机动。

无人驾驶飞行器手册 - BMS Defence
• 土耳其制造 • 坚固的复合材料 • 现代空气动力学外形 • 自主和手动飞行功能 • 垂直起飞和降落 • 10 公斤最大起飞 • 1.2 公斤有效载荷能力 • (热成像、变焦、双传感器或测绘相机) • 1 公斤有效载荷飞行时间 60-80 分钟 • 10 公里或 25 公里的视频传输 • 15 英寸屏幕、i5 处理器地面站(可选) • 10 英寸屏幕、i7 工业平板电脑地面站(可选) • 5 英寸/8 英寸屏幕遥控器或平板电脑(可选) • 在干扰环境中飞行(可选) • 目标跟踪(可选) • 目标坐标检测(可选) • 人脸识别 - 扫描(可选) • 使用激光测距仪测量距离(可选) • 测绘、3D 地形模型、GIS 数据收集(可选) • 气体泄漏检测(带摄像头)(可选) • 发现、监视和检测、搜索和救援和损害评估、地图绘制、地理信息系统和环境污染检测