XiaoMi-AI文件搜索系统
World File Search System飞行控制
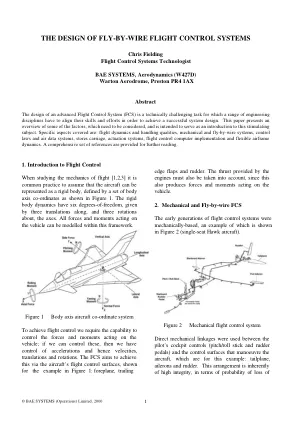
电传飞行控制系统的设计
如上所述,设计任务是在二维包络线上进行的,但是,需要考虑涵盖飞机攻角的第三维,以解决气动非线性和控制面配平能力的影响。此外,还需要考虑质量、惯性和重心变化的影响。需要将局部控制器设计集成在一起以覆盖飞行包络线。这通常可以通过使用增益调度来产生一组控制律来令人满意地实现。调度飞行控制律增益所需的信息通常来自空中数据系统,其中一个例子如图 5 所示。这包括一组适当位置的外部探头,用于提供皮托和静压以及局部气流测量(速度和方向)[7]。

基于遗传算法的飞行控制系统设计和优化...
本文介绍了一种飞行控制系统的设计程序。基于遗传算法的优化过程用于满足纵向平面的频域操纵品质要求。这些参数被实现为与预期带宽和延迟量级相关的适应度函数。还评估了适应度函数的参数化对搜索和优化过程的影响。针对实际模拟情况获得了增强型飞机的动态响应,并在与参考测试数据进行比较后进行了验证。在将飞行控制系统纳入模拟模型之前和之后估计纵向短期姿态响应的带宽和延迟,并将参数与预期操纵品质水平进行比较。论证了设计过程的可行性,并分析了生成过程的总体性能。 2004 Elsevier SAS。保留所有权利。
EF2000 飞行控制计算机的软件开发
空气数据传感器 航空电子系统 交叉通道数据链 数字发动机控制单元 飞行控制计算机 飞行控制系统 惯性测量单元 踏板传感器单元 操纵杆传感器和接口控制组件 公用控制系统

非线性建模与飞行控制系统设计
论文批准:无人机非线性建模与飞行控制系统设计,由 DENİZ KARAKAŞ 提交,部分满足中东技术大学机械工程系理学硕士学位的要求,作者:Prof. Dr. Canan Özgen 自然科学与应用科学研究生院院长 Prof. Dr. S. Kemal İder 机械工程系主任 Prof. Dr. R. Tuna Balkan 中东技术大学机械工程系主管 Prof. Dr. E. Bülent Platin 中东技术大学机械工程系联合主管 审查委员会成员: Prof. Dr. M. Kemal Özgören 中东技术大学机械工程系 Prof. Dr. R. Tuna Balkan 中东技术大学机械工程系 Prof. Dr. E. Bülent Platin 中东技术大学机械工程系 Prof. Dr. Y. Samim Ünlüsoy 机械工程METU 部 Volkan Nalbantoğlu 博士 ASELSAN 首席控制工程师 日期:2007 年 9 月 7 日

电传飞行控制系统的设计
如上所述,设计任务是在二维包络线上进行的,但是,需要考虑涵盖飞机攻角的第三维,以解决气动非线性和控制面配平能力的影响。此外,还需要考虑质量、惯性和重心变化的影响。需要将局部控制器设计集成在一起以覆盖飞行包络线。这通常可以通过使用增益调度来产生一组控制律来令人满意地实现。调度飞行控制律增益所需的信息通常来自空中数据系统,其中一个例子如图 5 所示。这包括一组适当位置的外部探头,用于提供皮托和静压以及局部气流测量(速度和方向)[7]。
飞行控制技术的进步与挑战...
我第 40 次 Alexander A. Nikolsky 荣誉演讲和期刊论文的目标是强调过去 50 年飞行控制技术的关键进步,并展示这些进步如何应用和扩展到新型旋翼机:现代高速军用旋翼机、eVTOL 城市空中机动和先进空中机动飞机。这篇期刊论文的第一部分回顾了旋翼机独有的飞行控制技术驱动因素,并强调了过去 50 年在操纵品质要求 (ADS-33)、基于物理的模型、系统识别和飞行控制领域的关键进展。一个中心主题是从时域到频域的转变,旋翼机的闭环响应和设计方法的表征越来越依赖于复杂的反馈控制系统来实现闭环稳定性、干扰抑制,最重要的是全天候操作的闭环操纵品质响应。重点介绍了过去 50 年的频域分析、设计和测试方法,涉及每个学科的关键进展和两个综合成功案例。在本文的第二部分,我们考虑了四种新型旋翼机的主要挑战、进步和未来需要的研究:军用未来垂直升力系列高速旋翼机、基于常规直升机的无人自主系统/城市空中机动、小型电动 VTOL 无人机旋翼机和大型 eVTOL 城市空中机动旋翼机。接下来的部分将探讨这四种新型旋翼机共同面临的挑战和解决方案空间,作为所需研究进展的蓝图。最后,本文回顾一下,从作者作为一名终身飞行控制工程师/研究员、飞行控制技术组负责人和高级技术专家的角度,考虑了经验教训和关键要点。
数字飞行控制系统的飞行品质飞行测试
本报告涵盖了作者认为特别重要的特定领域,特别是测试准备和数据分析部分。适当的准备和数据分析是任何成功飞行测试计划的基石,因此在本报告中得到了广泛的关注。此外,测试 DFCS 时潜在错误的后果可能是灾难性的,导致飞机损失或生命损失。由于这种类型的飞行测试通常很危险,因此测试团队有责任仔细规划和执行该计划。测试团队必须了解飞机预计会做什么、正在做什么以及两者的原因。有了这些知识,DFCS 飞行测试团队可以在执行测试程序期间做出适当的决定。在不最小化所涉及的其他领域的前提下,作者认为准备和数据分析是测试的两个最重要方面,因此强调这些领域。

现代飞行控制系统设计技术的集成
5.7 失速条件下 IC 和 LM 的控制功率评估图表和调整后的气动数据......................................................................................................... 101
飞行品质数字飞行控制系统的飞行测试
本报告涵盖了作者认为特别重要的特定领域,特别是测试准备和数据分析部分。适当的准备和数据分析是任何成功飞行测试计划的基石,因此在本报告中得到了广泛的关注。此外,测试 DFCS 时潜在错误的后果可能是灾难性的,导致飞机损失或生命损失。由于这种类型的飞行测试通常很危险,因此测试团队有责任仔细规划和执行该计划。测试团队必须了解飞机预计会做什么、正在做什么以及两者的原因。有了这些知识,DFCS 飞行测试团队可以在执行测试程序期间做出适当的决定。在不最小化所涉及的其他领域的前提下,作者认为准备和数据分析是测试的两个最重要方面,因此强调这些领域。