机构名称:
¥ 3.0
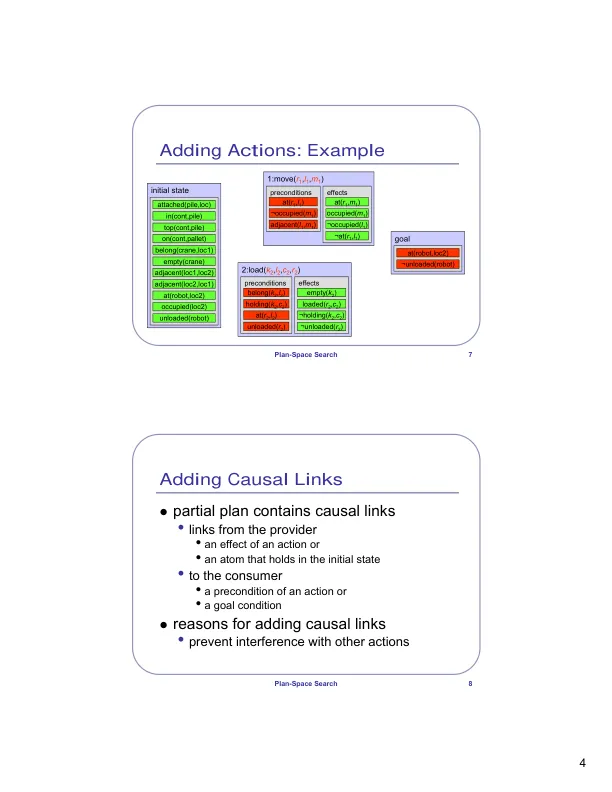
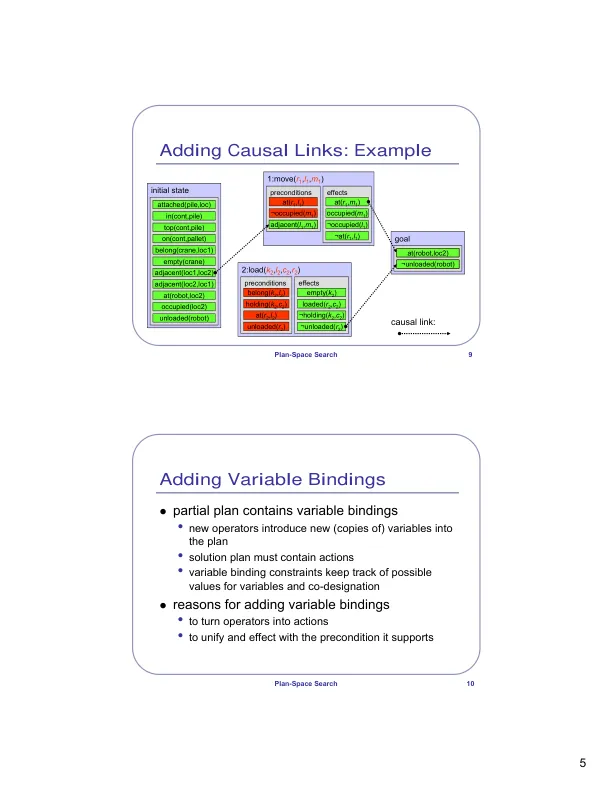
• A = { a 1 ,…, ak } 是一组部分实例化的规划算子; • ≺ 是 A 上的一组排序约束,形式为( ai ≺ aj ); • B 是 A 中动作变量的一组绑定约束,形式为 x = y、x ≠ y 或 x ∈ D x; • L 是一组因果关系,形式为〈 ai −[ p ] Æ aj 〉,满足: • ai 和 aj 是 A 中的动作; • 约束( ai ≺ aj )在 ≺ 中; • 命题 p 是 ai 的结果和 aj 的先决条件;并且 • 出现在 p 中的 ai 和 aj 中的变量的绑定约束在 B 中。
计划空间搜索
主要关键词
相关文件推荐