机构名称:
¥ 1.0
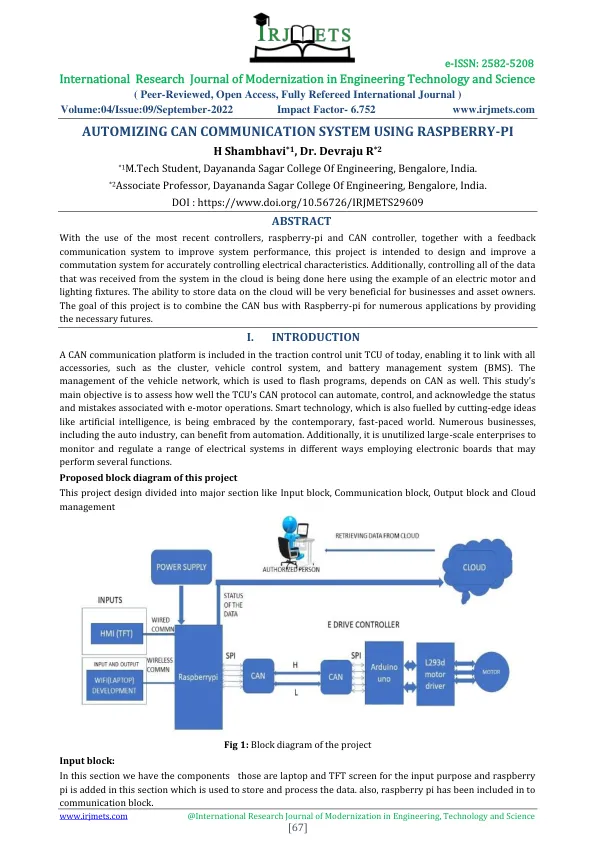
当今的牵引力控制单元 TCU 包含一个 CAN 通信平台,使其能够与所有附件(例如仪表盘、车辆控制系统和电池管理系统 (BMS))连接。用于刷新程序的车辆网络的管理也依赖于 CAN。本研究的主要目的是评估 TCU 的 CAN 协议如何自动执行、控制和确认与电动机操作相关的状态和错误。智能技术也受到人工智能等前沿理念的推动,正在被当今快节奏的世界所接受。包括汽车行业在内的许多企业都可以从自动化中受益。此外,大型企业还未利用电子板以不同的方式监控和调节一系列电气系统,这些电子板可以执行多种功能。
使用 RASPBERRY-PI 实现 CAN 通信系统的自动化
主要关键词


相关文件推荐