机构名称:
¥ 1.0
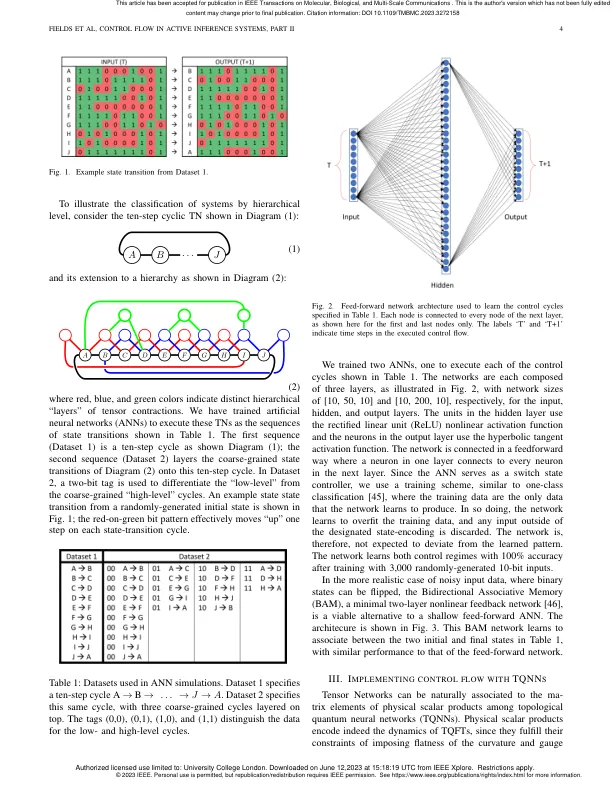
摘要 — 生命系统既面临环境的复杂性,又面临自由能资源的有限获取。在这些条件下生存需要一个控制系统,该系统能够以特定于环境的方式激活或部署可用的感知和行动资源。在第一部分中,我们介绍了自由能原理 (FEP) 和主动推理作为贝叶斯预测误差最小化的思想,并展示了主动推理系统中控制问题的产生方式。然后,我们回顾了 FEP 的经典和量子公式,前者是后者的经典极限。在第二部分中,我们展示了当系统被描述为执行由 FEP 驱动的主动推理时,它们的控制流系统始终可以表示为张量网络 (TN)。我们展示了如何在量子拓扑神经网络的一般框架内实现 TN 作为控制系统,并讨论了这些结果对在多个尺度上建模生物系统的意义。
主动推理系统中的控制流第二部分 - UCL Discovery
主要关键词




相关文件推荐