机构名称:
¥ 1.0
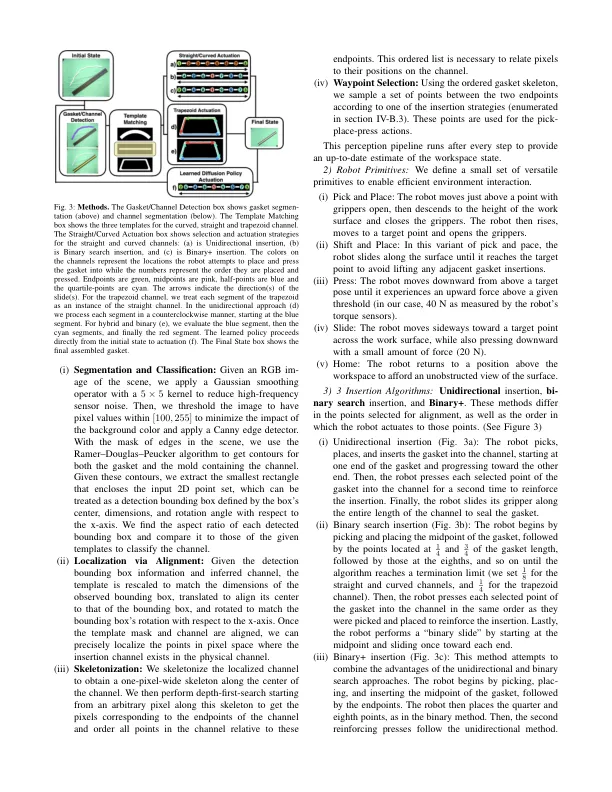
摘要 - 在垫圈组件中,必须将可变形的垫圈对准并压入狭窄的通道。此任务对于在自动机动器,电器,电子产品和其他产品的制造中密封表面很常见。垫圈组件是一项长摩龙,高精度任务,垫圈必须与通道保持一致,并被完全按下以实现安全的拟合度。为了比较方法,我们提出了4种垫片组装方法:深度模仿学习和三种程序算法的一种政策。我们通过100次物理试验评估了这些方法。的结果表明,二进制+算法在10/10上取得了直接渠道的成功,而基于250个人类遥控示范的学习政策在8/10的试验中取得了成功,并且较慢。可以在https://berkeleyautomation.github.io/robot-gasket/上找到代码,CAD模型,视频和数据。
自动化可变形垫片组件
主要关键词




相关文件推荐