点击购买,资源将自动在新窗口打开.
获取独家产品信息,尽享促销优惠!立即订阅,不容错过
* 限···时··优惠
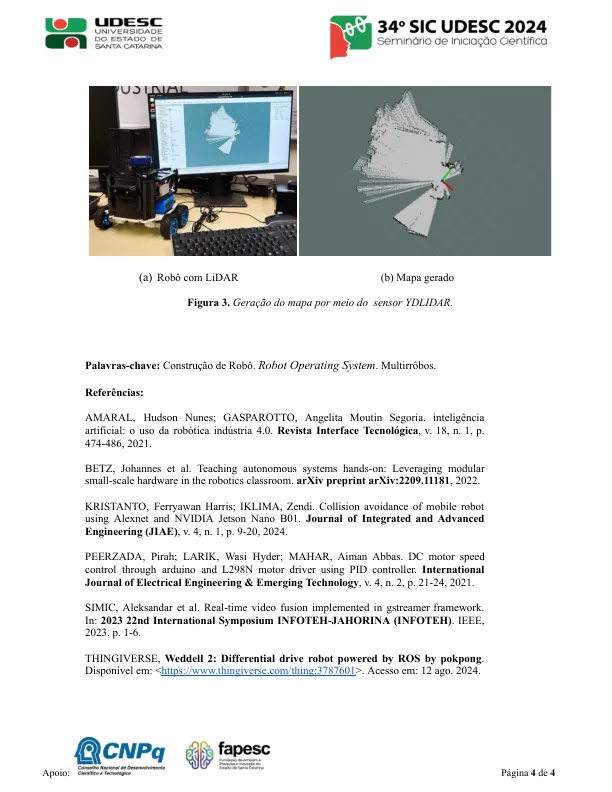
机器人配备了位于结构顶部的YDLIDAR品牌处理传感器。该传感器通过发射激光脉冲并测量到达物体后返回的时间来起作用。此外,该传感器已被配置为用于偏离障碍物和映射环境,如图3所示。在图3a中,您可以在表上看到机器人,该机器人连接到显示要生成的地图的计算机。在图3B中,传感器生成的地图显示更清楚。凭借该组件的粘附,机器人能够自动体现障碍物,如以下内容:https://youtu.be/7qny5oresve。
主要关键词