机构名称:
¥ 1.0
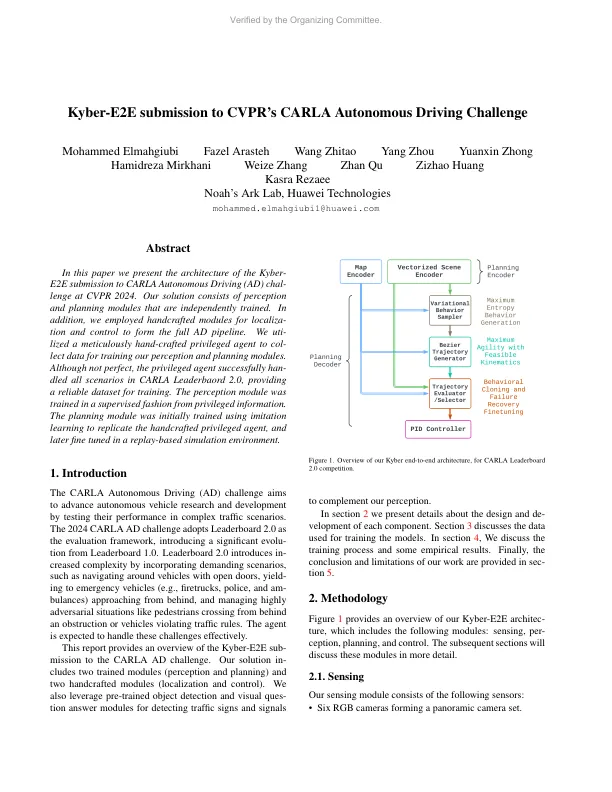
在本文中,我们介绍了Kyber-e2e提交给Carla Automous Driving(AD)Challenge的架构,CVPR2024。我们的解决方案包括经过独立培训的感知和计划模块。此外,我们采用了手工制作的模块来进行本地化和控制,以形成完整的AD管道。我们为精心手工制作的特权代理人提供了培训数据,以培训我们的看法和计划模块。尽管并不完美,但特权代理商成功地将Carla Leaderbaord 2.0中的所有场景成功提供了培训的可靠数据集。感知模块是从特权信息中以有监督的方式培训的。该计划模块最初是使用模仿学习来复制手工制作的特权代理的培训,后来在基于重放的仿真环境中进行了微调。
Kyber-E2E提交CVPR的CARLA自主驾驶挑战 计划以计划为导向的自主驾驶
主要关键词


相关文件推荐