机构名称:
¥ 1.0
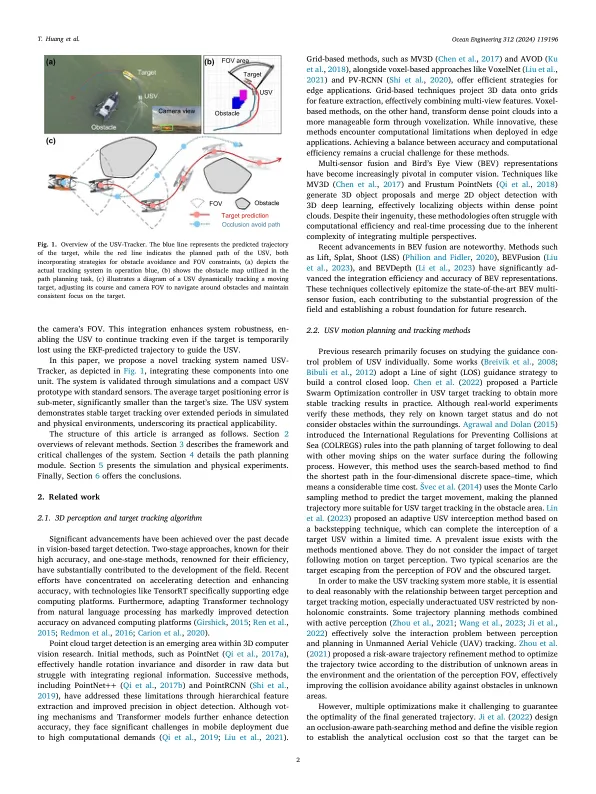
本文介绍了USV-Tracker,这是一种针对用于实用应用(例如地表调查和目标跟踪)的无人层面车辆(USV)的新型跟踪系统。该系统应对三个关键挑战:感知鲁棒性,跟踪隐藏和计划效率。这项工作的贡献是多方面的:(1)使用扩展的卡尔曼滤波器(EKF)的多传感器融合框架来增强目标检测和定位准确性,集成了来自相机,激光镜头,GPS和IMU传感器的数据。(2)一种两阶段的路径计划算法,该算法生成遮挡避免轨迹并采用虚拟弹性力约束来保持适当的相对定位。在密集的障碍环境中,该算法倾向于靠近目标,并结合了FOV取向约束以确保稳定的感知。(3)一种可见性感知的控制策略,可通过基于EKF的轨迹预测来确保持续的目标可观察性。凉亭中的模拟和相应的物理实验验证了系统的有效性和鲁棒性,证明了其在现实世界中的适用性。计算工作负载是在受约束的车载计算机上管理的,强调了系统的实用性。
USV跟踪器
主要关键词



相关文件推荐