点击购买,资源将自动在新窗口打开.
获取独家产品信息,尽享促销优惠!立即订阅,不容错过
* 限···时··优惠
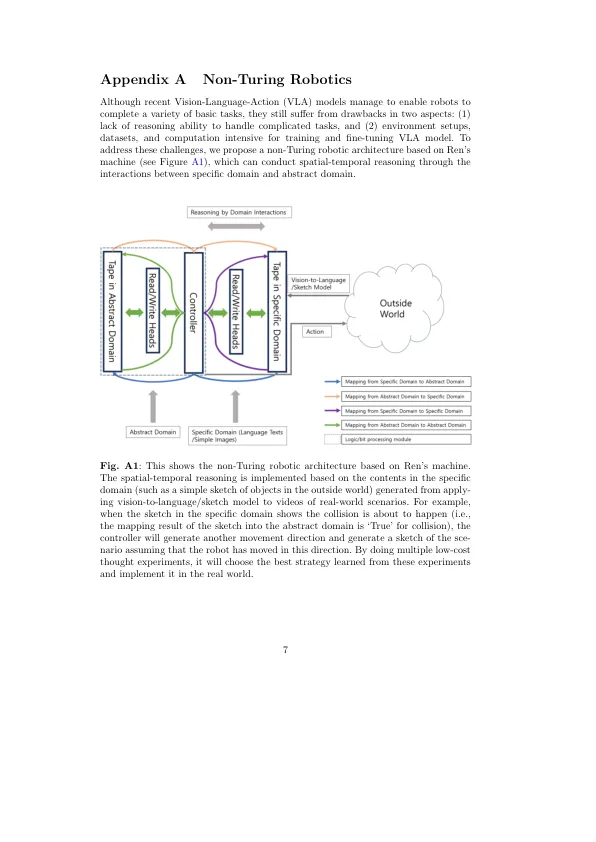
图a1:这显示了基于Ren的机器的非曲折机器人体系结构。基于特定域中的内容(例如,外界中的对象的简单草图)实现了时空推理,该内容是从应用视觉到语言/草图模型到真实世界情景的视频产生的。例如,当特定域中的草图显示碰撞即将发生(即,对于碰撞而言,草图的映射结果是“ true”的)时,控制器将生成另一个运动方向并生成Sce-Nario的草图,假设机器人已经朝这个方向移动。通过进行多种低成本思想实验,它将选择从这些实验中汲取的最佳策略,并在现实世界中实施。
主要关键词