机构名称:
¥ 2.0
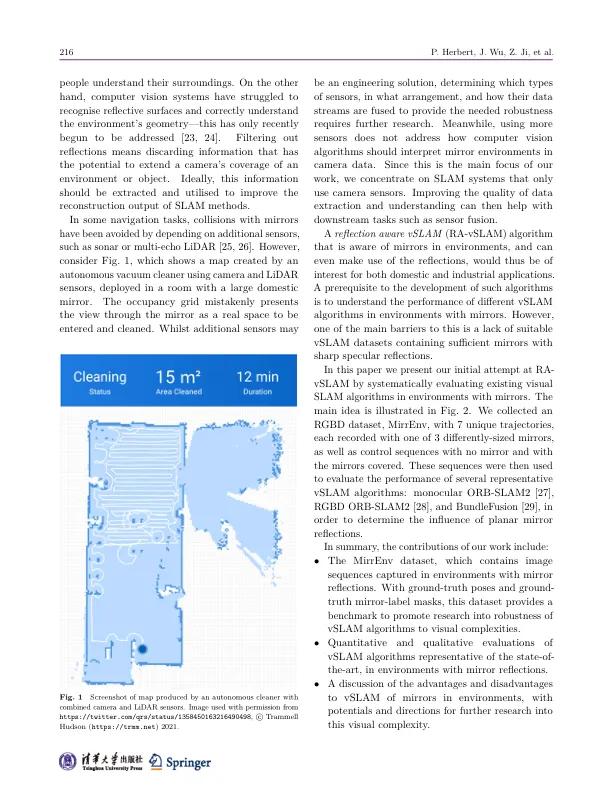
抽象的视觉同时定位和映射(VSLAM)为室内和室外导航发现了应用程序,这些应用程序通常会使其经常受到视觉复杂性的影响,尤其是镜像的反射。镜像存在的影响(时间可见及其在框架中的平均大小)的影响会影响定位和映射性能,而系统使用的直接技术预计会表现较差。因此,收集了记录在镜像环境中的图像序列的数据集Mirrenv,并用于评估现有代表性方法的性能。RGBD ORB-SLAM3和BUNDLEDEFUSION似乎随着镜像持续时间的增加显示了绝对轨迹误差的中等降解,而其余结果并未显示出显着降低的定位性能。事实证明,生成的网格图非常不准确,重建中的真实和虚拟反射碰撞。讨论了镜子环境中可能的错误和鲁棒性来源,概述了未来的方向,以验证和改善在平面镜的存在下VSLAM性能。Mirrenv数据集可从https://doi.org/10.17035/d.2023.0292477898获得。
在镜像环境中对视觉大满贯方法进行基准测试
主要关键词



相关文件推荐