机构名称:
¥ 1.0
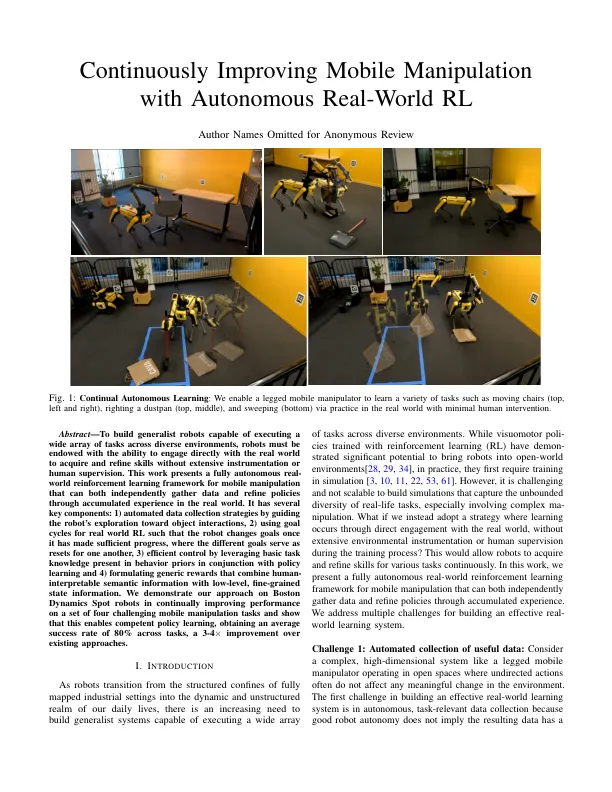
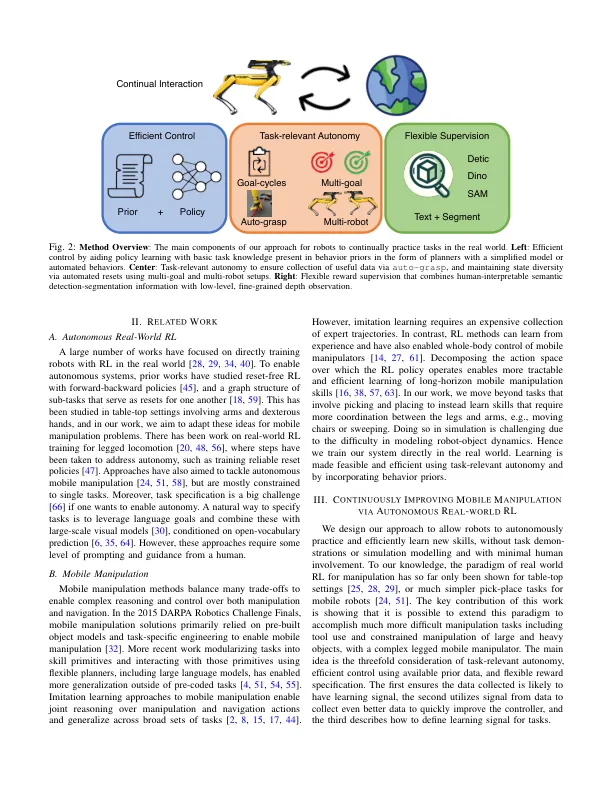
摘要 - 要建立能够在各种环境中执行各种任务的通用机器人,机器人必须具有直接与现实世界互动的能力,可以在没有广泛的仪器或人类监督的情况下获得和完善技能。这项工作为移动操作提供了一个完全自主的现实世界加强学习框架,可以通过在现实世界中的积累经验来独立收集数据并完善政策。It has several key components: 1) automated data collection strategies by guiding the robot's exploration toward object interactions, 2) using goal cycles for real world RL such that the robot changes goals once it has made sufficient progress, where the different goals serve as resets for one another, 3) efficient control by leveraging basic task knowledge present in behavior priors in conjunction with policy learning and 4) formulating generic rewards that combine human- interpretable semantic具有低水平,细粒度信息的信息。我们在波士顿动态机器人方面展示了我们在不断提高四项具有挑战性的移动操纵任务的性能的过程中,并表明这使得能够有效的政策学习,从而获得了整个任务的平均成功率,而对现有方法的平均成功率为80%。
通过自主现实世界RL
主要关键词


相关文件推荐