机构名称:
¥ 5.0
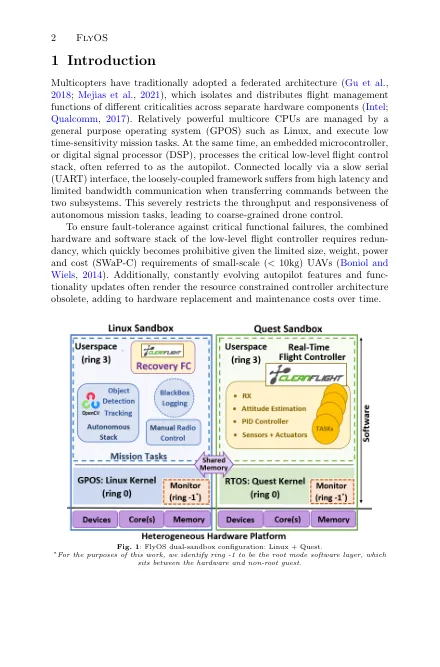
自主多旋翼飞行器通常采用联合架构,这会导致独立硬件组件之间的通信成本相对较高。这些成本限制了对新任务目标做出快速反应的能力。此外,如果不引入影响尺寸、重量、功率和成本 (SWaP-C) 约束的新硬件,联合架构就无法轻松升级。反过来,这些约束限制了使用冗余硬件来处理故障。为了应对这些挑战,我们提出了 FlyOS,这是一种集成模块化航空电子 (IMA) 方法,用于在异构多核航空平台上的软件中整合混合关键性飞行功能。FlyOS 基于分离内核,可在虚拟化沙盒操作系统之间静态划分资源。我们提出了一种双沙盒原型配置,其中时间和安全关键的飞行控制任务在实时操作系统中执行,而任务关键的基于视觉的导航任务在 Linux 沙盒中执行。低延迟共享内存通信允许在沙盒之间实时传递飞行命令和数据。还部署了基于虚拟机管理程序的容错机制,以确保在关键功能或时间故障时进行故障转移飞行控制。我们验证了 FlyOS 的性能,并展示了其与传统架构相比在可预测、可扩展和高效飞行控制方面的优势。
FlyOS:重新思考集成模块化航空电子设备...
主要关键词



相关文件推荐