机构名称:
¥ 1.0
空域管理 空域管理必须发展为无人机系统交通管理 (UTM),以适应自主性。它必须具有适应性,以适应在同一空域中共存的非自主和自主飞行器的变化组合。空中交通管理系统将需要一定程度的自主性,以应对各种飞行器以及大幅增加在受控空域中运行的飞行器数量的潜力。空域控制将扩展到地面和 2000 英尺之间的高度,以充分利用较低的空域。不可避免地会从传统方法过渡到新方法,并且在过渡过程中管理不同方法将面临挑战。
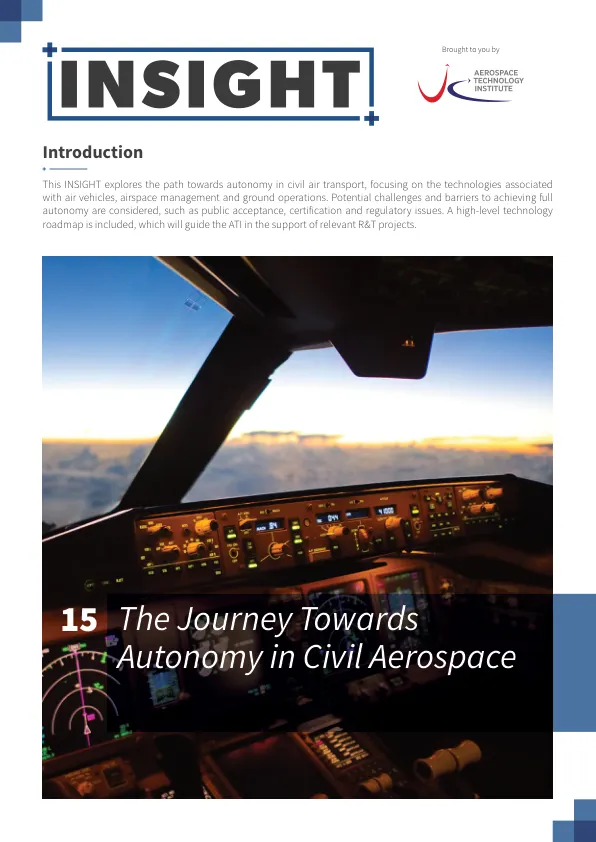
15 民用航空自主化之路
主要关键词

相关文件推荐