机构名称:
¥ 2.0
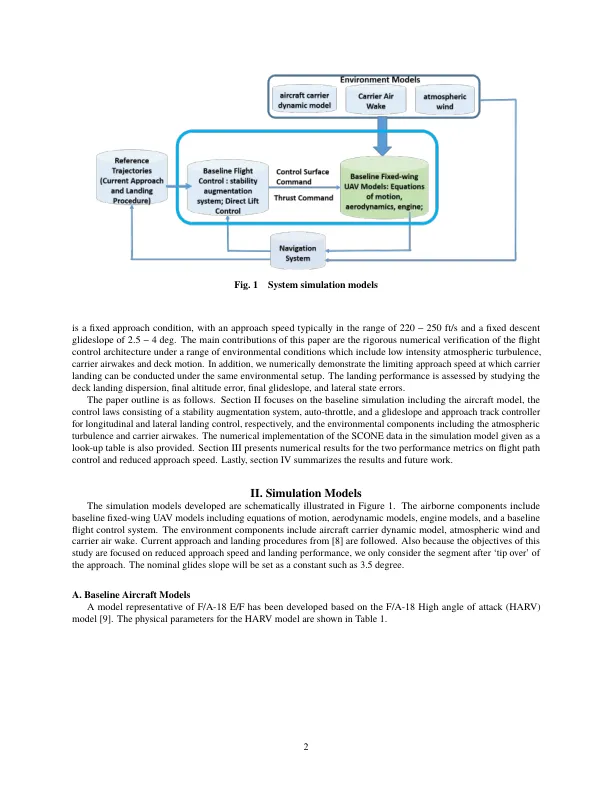
无人机具有提高操作灵活性和降低任务成本的良好能力,我们正在利用固定翼无人机实现的自动航母着陆性能改进。为了展示这种潜力,本文研究了两个关键指标,即基于 F/A-18 大攻角 (HARV) 模型的无人机飞行路径控制性能和降低进近速度。着陆控制架构由自动油门、稳定增强系统、下滑道和进近航迹控制器组成。使用蒙特卡洛模拟在一系列环境不确定性下测试控制模型的性能,包括由风切变、离散和连续阵风以及航母尾流组成的大气湍流。考虑了真实的甲板运动,其中使用了海军研究办公室 (ONR) 发布的海军环境系统表征 (SCONE) 计划下的标准甲板运动时间变化曲线。我们通过数字方式演示了允许成功着陆航母的限制进近条件以及影响其性能的因素。
无人机航母着陆的建模与仿真 - arXiv
主要关键词




相关文件推荐