XiaoMi-AI文件搜索系统
World File Search System高速
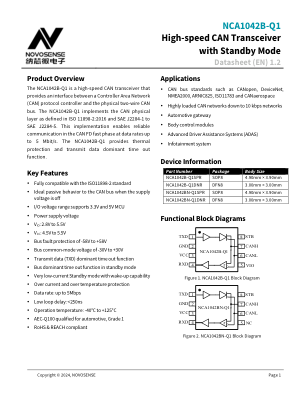
具有待机模式的 NCA1042B-Q1 高速 CAN 收发器
7.1. 概述 ................................................................................................................................................................................ 14 7.2. 功能框图 ................................................................................................................................................................ 14 7.3. 特性描述 ................................................................................................................................................................ 15 7.3.1. TXD 显性超时功能 (TXD DTO) ............................................................................................................................. 15 7.3.2. 总线显性超时功能 (Bus DTO) ............................................................................................................................. 15 7.3.3. 引脚 VCC 和 VIO 上的欠压检测 ............................................................................................................................. 15 7.3.4. 未上电设备 ............................................................................................................................................................. 15 7.3.5. TXD 和 STB 输入引脚的内部偏置 ............................................................................................................................. 15 7.3.6. 7.3.7. 过流保护 (OCP) ...................................................................................................................................................... 16 7.4. VIO 电源引脚 ...................................................................................................................................................... 16 7.5. 设备功能模式 ...................................................................................................................................................... 16 7.5.1. CAN 总线状态 ...................................................................................................................................................... 16 7.5.2. 正常模式 ............................................................................................................................................................. 17 7.5.3. 待机模式 ............................................................................................................................................................. 17 7.5.4. 驱动器和接收器功能表 ................................................................................................................................ 17
高速公路资产管理策略
•领导力和组织 - 运输和计划的投资组合持有人支持管理高速公路资产的方法,从而提供了强大而清晰的领导力,以支持管理高速公路资产的方法。WCC能够为主要资产提供额外的资金,证明了高速公路资产在其社区,游客和经历的人们的日常生活中的重要性。•客户满意度(通信) - 理事会认识到客户反馈和客户满意度的重要性,以帮助告知高速公路维护服务的方式。WCC是国家高速公路和运输(NHT)调查网络的成员,并使用此数据将用户满意度水平与相似大小的高速公路当局进行比较。这可以识别有效的服务提供领域和重点的重点以进行改进。理事会还将确保客户有机会就高速公路服务的各个方面提供反馈。•能力和培训 - WCC已经开发了一种资产管理能力矩阵,以定义所有参与资产管理维护的员工的AM能力级别。从这个矩阵中,理事会还将能够制定个人资产管理培训要求和更广泛的部门资产管理培训计划。•风险管理 - WCC资产管理方法是基于风险的,因此进行了最佳治疗。理事会还针对其弹性网络采用了基于风险的方法。准确,定期更新的数据对于决策过程和报告至关重要。•资产管理系统 - 资产管理系统提供有关所有高速公路资产的信息,其中包括其属性,状况,网络位置,高速公路网络的范围和整体绩效。我们认识到良好的数据管理系统在基于声音资产数据的持续改进和有效的投资建模方面的作用。•基准测试(最佳实践) - 作为我们文化的一部分,我们致力于发展最佳实践和持续改进。我们通过与他人的合作,尤其是通过与米德兰高速公路联盟(MHA+)的其他地方当局的合作框架来促进和分享最佳实践,以提高效率。•绩效监控 - 我们的绩效管理安排支持我们的资产管理交付。绩效监控考虑了资产管理目标和服务交付目标。

通过高速X射线成像和热分析探索锂离子电池中的热失去传播:细胞化学和电动
电池安全设计非常重要,要考虑从单个锂离子电池到宏观系统的水平。在宏观层面上,一个单元格中的故障会导致热失控的传播,并迅速将整个电池组放在火上。可能影响传播结果的因素,例如细胞模型/化学和电连接,在这里使用测量组合进行了研究。进行了几项滥用测试,结合了两个不同的细胞模型(Molicel P42A和LG M50,均为21700)和平行连接(每次配置16个测试)。总体而言,从32次进行的测试中测量了56%的传播结果,最低温度为150℃以启动传播,并且在123 s中发生了最快的传播。温度测量在串联连接的细胞中较高,引发了对细胞化学的讨论以及对此作用的内部耐药性。串联和平行连接中热失控期间电流流的差异,以及如何进一步讨论这会影响温度演化。X射线射线照相的时空映射使我们得出电池内部热失控演变的速度,并表明串联连接的电池,尤其是P42A的发生速度更快。进一步观察到,仅在P42AS中仅在相应的指甲穿过的细胞中发生了跨侧壁行为,例如温度诱导的漏洞和压力诱导的破裂。

包含第三代先进高强度不锈钢和铝挤压和铸造的多材料堆栈的高速连接 (Ab
本报告是作为美国政府机构赞助的工作的说明而编写的。美国政府及其任何机构、巴特尔纪念研究所及其任何员工均不对所披露的任何信息、设备、产品或流程的准确性、完整性或实用性做任何明示或暗示的保证,也不承担任何法律责任或义务,也不表示其使用不会侵犯私有权利。本文以商品名、商标、制造商或其他方式提及任何特定商业产品、流程或服务并不一定构成或暗示美国政府或其任何机构或巴特尔纪念研究所对其的认可、推荐或支持。本文表达的作者的观点和意见不一定代表或反映美国政府或其任何机构的观点和意见。

高速高光谱腹腔镜成像系统的设计和验证
所有这些都已纳入MIS成像系统中,希望减少不良结果,例如吻合式泄漏发生率,9个医源性损伤,10和肿瘤阳性。11由于这些技术已被证明可以改善手术结果,因此他们看到现代临床系统中的翻译增加了。因此,我们将更深入地简要介绍每个。立体可视化可以通过向外科医生的每只眼睛传输两个视频源来模仿人脑中的深度感知,从而实现了手术领域的3D可视化。12这项技术的好处在很大程度上是主观的,比较研究表明,外科医生对3D可视化的一般偏好。13个商业系统,例如Da Vinci机器人(Intuitive Surgical Inc.,Sunnyvale,California,California,美国),将这项技术纳入了当前的外科平台。fi可以增强解剖特征的可视化,包括脉管系统,14、15个哨兵淋巴结,16、17和肿瘤。18,19吲哚烷绿色(ICG)是最常用的荧光团,因为它是食品和药物管理 - 批准(以及5-氨基苯甲酸用于神经胶质瘤成像),但其他人已在包括甲基蓝色和Irdye®在内的潜在应用中探索了其他。许多临床系统包括具有ICG的FI模式,包括Da Vinci Firefly模式和Stryker的精确成像系统。NBI是一种光学成像方式,它使用狭窄的光学过滤器过滤红灯,重点放在蓝色和绿灯上。Seidlitz等。 28,29Seidlitz等。28,298,这种成像技术已被奥林巴斯成像系统普及用于肿瘤检测20和子宫内膜异位症鉴定,其中21种应用在其他应用中。这些最新的系统仍然具有诸如ICG的快速半衰期和饱和效应,或实时缺乏客观的定量分析。22,23尽管使用这些荧光剂的研究显示出令人鼓舞的结果,但需要做更多的工作来实现可量化的结果并巩固患者的益处。24同样,NBI对MIS的贡献也是主观的,技术是可视化助手而不是作为诊断工具。高光谱成像(HSI)已针对非侵入性,无标签和Quantative应用,因为它捕获了光谱和空间信息而无需对比度。25 HSI已用于执行语义分割任务,与各种分类技术一起使用时区分不同的组织类型。26证明了HSI在19个类别进行语义分割方面的优势,表现优于正常的RGB数据和组织参数图像,包括组织氧合,灌注,水和血红蛋白指数显示为原始图像的热图。也就是说,在肠道组织中通过HSI 27测量组织参数图像并测量血氧饱和的能力仍然在其他应用中(例如结直肠吻合术)。

月球环境下航天器MMOD防护结构超高速撞击评价技术,三菱重工技术评论第61卷第1期(2024年)
对于月球表面的开发,日本国内外都在开发月球轨道站 (Gateway)、月球着陆器和月球探测车。此外,还正在研究旨在在月球表面生活的建筑和发电技术。特别是,为载人操作而设计的系统需要配备防护结构,以防可能来袭的微流星体和轨道碎片 (MMOD) 造成人员伤亡 (1)。载人航天器的典型 MMOD 防护结构是惠普尔防护罩,由称为“保险杠”的板和后壁组成,保险杠通过隔离物 (2) 连接到后壁的外表面,如图 1 (a) 所示。目前运行的国际空间站(ISS)日本实验舱(JEM)和H-II转移飞行器(HTV)均采用了三菱重工株式会社开发的MMOD防护结构,没有因微流星体或空间碎片撞击而出现功能损坏(图1(b))。

男子175D项目指南 - 海洋四冲程高速...
3.13 Engine operating/service temperature and pressure values....................................................347 3.14 Filling volumes (oil and coolant capacities)..............................................................................351 3.15 Emission values..........................................................................................................................351 3.16 Exhaust gas – possible components and visibility ...................................................................352 3.17 Emission-related installation instruction for engines...............................................................354 3.18 Noise............................................................................................................................................356 3.18.1 Airborne noise ...........................................................................................................356 3.18.2 Exhaust gas noise .....................................................................................................357 3.18.3 Noise and vibration – Impact on foundation...............................................................360

2024年中年度会议高速公路能力和服务质量(ACP40)
TRB常设委员会关于高速公路能力和服务质量(ACP40)和交通模拟(ACP80)的中年会议将于2024年8月6日至8日在北卡罗来纳州罗利举行。1主持人是北卡罗来纳州立大学。共同主持人是NCSite(运输工程师研究所的北卡罗莱纳州分会,https://ncsite.org)及其Carolinas(https://itscarolinas.org)。会议的目的是使用《公路容量手册》(HCM)和仿真找到交通分析和建模的协同基础。与会者将帮助委员会确定当时的HCM和模拟方法,工具和研究的方法,可以更紧密地连接和集成,以解决实际应用,以解决当今的运输问题,并为我们准备明天的挑战做好准备。

低成本的高速纤维耦合干涉仪,用于精确的表面经理测量法
摘要:由于它们的非接触式和快速测量功能,激光干涉仪代表了表面验证仪的触觉手写笔仪器的有趣替代方法。除了这些出色的属性外,收购成本在行业中起着重要作用,限制了光学辅助仪的频繁使用,而光学仪比触觉修理仪昂贵得多。我们提出一个低成本激光测量干涉仪,其轴向重复性以低于1 nm的速度,以每秒38,000高的高度值。传感器的性能已在几个表面标准上进行了验证,可达到高达160 mm/s的横向扫描速度。进一步到高扫描速度,高采集率通过平均测量高度值来提高测量精度。例如,可以将625 pm的标准偏差用于重复测量值,以牺牲数据速率为代价。但是,传感器概念为进一步提高数据速率和测量可重复性提供了潜力。

H-V2X:BEV感知的大型高速公路数据集
摘要。车辆到全部用途(V2X)技术已成为路边基础感知数据集,因此已成为研究领域。但是,这些数据集主要关注城市交叉点,并且缺乏公路方案的数据。此外,数据集中的感知任务主要是由于跨多个传感器的同步数据,因此主要是单声道3D。为了弥合这一差距,我们提出了高速公路-V2X(H-V2X),这是第一个大型高速公路鸟类视图(BEV)感知数据集,由传感器在现实世界中捕获。数据集覆盖了超过100公里的高速公路,并具有多种道路和天气状况。h-v2x由超过190万个BEV空间中的精细粒度分类样品组成,由多个同步摄像机捕获,并提供了矢量图。我们进行了联合2d-3d校准,以确保涉及正确的投影和Human劳动,以确保数据质量。此外,我们针对公路方案提出了三个高度相关的任务:BEV检测,BEV跟踪和轨迹预测。我们为每个任务进行了基准,并提出了包含向量图信息的创新方法。我们希望H-V2X和基准方法将促进BEV感知研究方向的高速公路。该数据集可从https://pan.quark.cn/s/86d19da10d18