XiaoMi-AI文件搜索系统
World File Search SystemIMUS

10-dof-mems-imu-传感器数据表.pdf
一开始,惯性测量单元是一种电子设备,它使用加速度计、陀螺仪和磁力计的组合来测量和报告飞行器的速度、方向和重力。现在,惯性测量单元通常用于人机交互 (HCI)、导航目的和平衡技术,众所周知,Segway 个人运输车就是使用这种技术。
霍尼韦尔国防与航天概况
• 惯性测量装置和制导系统可为商业和军事应用提供精确导航。如需了解更多信息,请访问我们的霍尼韦尔航空航天网站。霍尼韦尔设计和制造高性能、行业领先的惯性测量装置 (IMU),几乎每架飞机都使用它们来导航它们到达预定目的地。

GPS-IMU传感器融合用于可靠的自动驾驶位置估计
摘要 - 全球覆盖范围和全球覆盖范围的准确定位,使其成为具有无障碍天空视图的开放区域的可靠选择。但是,在室内空间和城市峡谷中可能发生信号降解。相比之下,惯性测量单元(IMU)由陀螺仪和加速度计组成,这些计量机提供了相对运动信息,例如加速度和旋转变化。与GPS不同,IMU不依赖外部信号,使其在受GPS有限的环境中有用。尽管如此,由于误差的积累,IMU在整合加速度以确定速度和位置的同时会流动。因此,融合GPS和IMU对于增强自动驾驶汽车中导航系统的可靠性和精度至关重要,尤其是在GPS信号受到损害的环境中。为了确保平稳导航并克服每个传感器的局限性,提出的方法将融合GPS和IMU数据。此传感器融合使用无知的卡尔曼过滤器(UKF)贝叶斯过滤技术。拟议的导航系统旨在坚固,为自动驾驶汽车的安全操作(尤其是在GPS被拒绝的环境中的安全操作)至关重要的连续和准确的定位。该项目使用Kitti GNSS和IMU数据集进行实验验证,表明GNSS-IMU融合技术可减少仅GNSS的RMSE。RMSE分别从13.214、13.284和13.363降至4.271、5.275和0.224,分别为X轴,Y轴和Z轴。使用UKF的实验结果显示了使用GPS和IMU传感器融合改善自动驾驶汽车导航的有希望的方向,并使用GPS有限环境中的两个传感器中的最佳融合。索引术语 - 自主车位,全球定位系统,惯性测量单元,传感器融合,无知的卡尔曼滤波器

Atom互动:朝向集成的量子惯性导航系统
原子干涉法是一种高度精确的惯性传感技术(Kasevich等,1991)。可以通过一系列激光脉冲询问免费的原子波包,可以提取有关加速度和转弯速率的信息,从而计算完整的导航解决方案(位置,速度和态度)。Applications of this technique for accelerometers (Barrett et al., 2014 ), gyroscopes (Gauguet et al., 2009 ; Schubert et al., 2021 ), and complete inertial measurement units (IMUs) (Gebbe et al., 2021 ; Gersemann et al., 2020 ) based on Bose–Einstein condensates are currently under research.惯性导航1小时后的潜在位置精度达到5 m(Jekeli,2005年),这使原子干涉法成为全球导航卫星系统(GNSS)遭受重复环境的高度有希望的技术。

欧空局科学核心技术计划带来的社会经济效益
此前,InnaLabs 已赢得 ESA CTP 合同,开发适用于太空任务的陀螺仪,目前他们已提供可用于某些太空活动的 IMU - POLARIS,适用于短期至中期太空任务,如发射器、微型发射器、着陆器和再入飞行器。然而,POLARIS 中的加速度计基于航空级设计,而不是抗辐射加速度计;因此,随着 AQUILA 引入其产品组合,他们有可能提供更强大的 IMU 产品,包括抗辐射陀螺仪和加速度计。此外,通过将 AQUILA 出售给其他生产 IMU 的公司,他们提供了一种构建完全欧洲化的 IMU 的解决方案,不受出口限制,而这迄今为止还无法实现。

步态偏差和神经疾病:定量测量的比较研究
步态是一系列协调的运动,使人类可以从一个地方移到另一个地方,是我们日常生活的基本方面。步态研究对包括生物力学,康复,运动科学和机器人技术在内的各个领域具有深远的影响。传感器技术的最新进展,例如惯性测量单元(IMUS)[1-5]和运动捕获系统[6,7],使得可以同时从多个关节中收集高分辨率角度数据[1,8-11]。临床步态分析(CGA)利用了描述步态的这种序列,以便为临床医生提供决策援助[12,13]。在步态康复的框架中,必须采取定量措施来评估治疗过程中患者的进度。文献中的几件作品解决了这一领域,到目前为止,已经提出了不同的措施[13]。最广泛使用的是步态偏差指数(GDI)[14],例如步态谱分数(GPS)[15]和Gillette步态指数(GGI)[16]。这种措施的目的是量化与正常步态模式的偏差。

基于IMU的在线多灯校准
现代自主系统通常使用多个传感器进行感知。为了获得最佳性能,需要准确且可靠的外部校准。在这项研究中,我们提出了一种可靠的技术,用于对车辆上几个激光痛的外在校准,而无需进行探测率估计或纤维标记。首先,我们的方法通过将共同置于每个LiDAR的IMU的原始信号匹配,从而生成了对外部产品的初始猜测。然后在ICP和点云特征匹配中使用了此初始猜测,从而重新发现并验证了此估计值。此外,我们可以使用可观察性标准选择具有最高互信息的IMU测量值的子集,而不是比较所有读数。我们使用从Scania测试车中收集的数据成功验证了我们的方法。
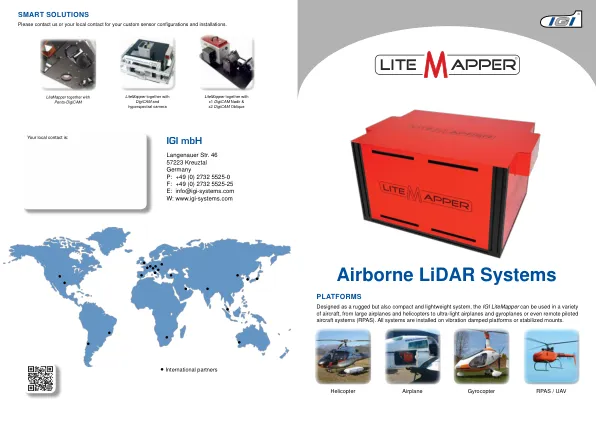
机载 LiDAR 系统
所有航空 LiDAR 系统的核心都是用于直接地理参考的精确定位系统 AEROcontrol。使用不同的免出口 IMU,AEROcontrol 可以精确测量传感器或传感器星座的位置和飞行姿态,频率高达 600 Hz。该系统为所有集成传感器提供一个操作员界面。与 AEROoffice 结合使用,可提供简化的数据工作流程和内置杠杆臂校正,以提高所有航空测绘应用的生产率。特点:• 一个紧凑的系统,多种应用(为机载、陆地、水面和铁路应用实施特殊的前向/后向卡尔曼滤波算法)• 544 通道 GPS、GLONASS、BEIDOU、GALILEO、IRNSS、QZSS 支持,支持 TERRASTAR • 基于测量级 FOG 和 MEMS 的 IMU,全部免出口 • IGI 精确调平 - 基于 IMU 的精确稳定支架控制

MCD:机器人感知的多种大型多校区数据集
感知在各种机器人应用中起着至关重要的作用。但是,现有的良好的数据集偏向自动驾驶场景,而未标记的SLAM数据集则很快过于拟合,并且通常缺乏环境和域变化。为了扩大这些领域的边界,我们介绍了一个名为MCD(Multi-campus数据集)的全面数据集,其中包含各种感应方式,高准确的地面真相以及在三个欧亚大学的欧亚大学校园内的挑战性环境。MCD包括CCS(经典的圆柱旋转)和NRE(非重复性环球)LIDAR,高质量的IMU(惯性测量单元),相机和UWB(URWB(Ultra-Wideband))传感器。更重要的是,在开创性的努力中,我们引入了29堂课的语义注释,超过59k稀疏的nre lidar扫描

2025 美元媒体工具包
• 5G 无线电 • 增材层制造 • 先进材料 • 发动机辅助系统 • 天线 • 人工智能 (AI) • 自动驾驶仪 • 电池 • 线束 • 复合材料 • 连接器 • 数据存储 • 设计软件 • 电动机 • 嵌入式计算 • 发动机控制单元 • 燃料电池 • 万向架 • 地面控制系统 • 图像传感 • IMU、陀螺仪和加速度计 • 发射系统 • 激光雷达 • 机器学习 • 机床 • 维护 • 运动控制 • 电机控制器 • 导航系统 • 降落伞 • 性能监控 • 个人信息系统 • 电源管理系统 • 螺旋桨 • 无线电链路和遥测 • 实时操作系统 • 感知与规避/雷达 • 伺服执行器 • 模拟与测试 • 太阳能 • 声纳与声学系统 • 群集 • 热传感器 • 应答器 • UTM • 视频编码