XiaoMi-AI文件搜索系统
World File Search Systemmanipulation



虚拟操控简介
传播有关作为北约演习旗舰的英国航空母舰发生故障的报道——105 名参与者传播了 127 条消息,获得了 474 万次浏览量。相比之下,俄罗斯媒体强调俄罗斯军事硬件的强大,例如现代化的 TU160 战斗机,宣传北约部队无法发现它们——这一说法由至少 17 名英语参与者传播。 组织弱点:叙述重点关注北约感知到的组织弱点,包括空仓库、领导不力以及无法快速做出决策。 北约不构成威胁:叙述断言北约对俄罗斯不构成真正的威胁。2024 年 4 月下旬,199 名参与者发布了关于在莫斯科市中心展示北约“战利品装备”的信息,获得了 251 万次浏览量,进一步证实了这一点。我们观察到有关此次活动的报道,以及北约秘书长延斯·斯托尔滕贝格关于此次展览的声明的转发,并评论了他和北约的弱点。这种说法一直传播到 2024 年 5 月 9 日,即俄罗斯“战胜纳粹侵略者日”。

话题:基因操控
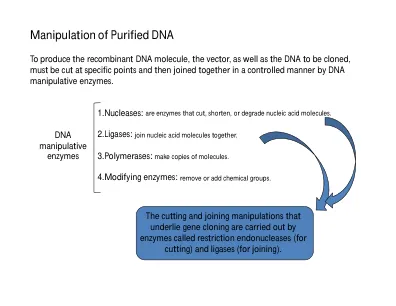
基因克隆是指分离目标 DNA 序列以复制多个副本的过程。目标基因被分离(通过 PCR),然后插入质粒载体(通过消化和连接)。质粒载体能够在宿主细胞内自主复制,确保序列被克隆。重组载体可用于创建转基因生物 (GMO),进而可用于生产大量治疗性蛋白质(生物制药)。基因克隆的过程涉及多个步骤:•用聚合酶链式反应(PCR)分离和扩增目的基因(和质粒载体)•如果要将基因整合到细菌细胞中,则需要 cDNA 拷贝(逆转录)•用相同的特异性限制性酶(平端或粘端)消化基因和质粒载体•通过将目的基因连接到质粒载体(使用 DNA 连接酶)来创建重组质粒•通过凝胶电泳将重组质粒与正常质粒(没有目的基因)分离•通过载体递送方法(例如电穿孔)将重组质粒引入靶细胞•在抗生素培养基中培养细胞以选择修饰细胞(只有带有质粒的细胞才具有抗生素抗性)

10 种操纵策略
著名评论家、麻省理工学院语言学家诺姆·乔姆斯基是过去十年中知识分子异议的典型代表之一,他列出了十种最常见、最有效的策略,这些策略是“隐藏的”议程通过媒体操纵民众而采取的。从历史上看,媒体已被证明是塑造舆论的高效手段。由于媒体的宣传和宣传,社会运动被创造或摧毁,战争被合理化,金融危机被缓和,一些其他意识形态潮流被激发,甚至媒体成为集体心理中现实的生产者。但如何发现最常见的策略来理解这些我们肯定参与其中的社会心理工具?幸运的是,乔姆斯基被赋予了综合和揭露这些做法的任务,其中一些更明显、更复杂,但似乎都同样有效,从某种角度来看,它们具有贬低性。鼓励愚蠢、促进内疚感、分散注意力或制造人为问题然后神奇地解决它们,这些只是这些策略中的一部分。

双原子转子的形成和操纵……
图 1. 在具有稀释 Cs 吸附原子的 CsV 3 Sb 5 的 Sb 表面构建 Cr-Cs 双原子转子。 (a) 双原子转子形成示意图。 Cr/Fe 原子(用黄色球标记)作为单个原子分布并被 Cs 原子(用红色球标记)捕获,从而在 kagome 超导体 CsV 3 Sb 5 的 Sb 表面形成双原子转子。 (b) STM 图像显示具有稀释 Cs 原子的 CsV 3 Sb 5 晶体的 Sb 表面。 Cr-Cs 双原子转子用红色虚线圆圈突出显示(V s =-500 mV,I t =3 nA)。 (c) - (d) 尖端诱导 Cr-Cs 转子分离为 Cr 原子和 Cs 原子。分离前,Cr原子围绕Cs原子旋转,形成具有不稳定环带的Cr-Cs转子(c)。分离后,Cs和Cr原子的形貌清晰可见(d)。V s =-500 mV,I t =3 nA。(e),左:(c)中的旋转速率图ω(r),显示Cr原子沿圆形轨道绕Cs旋转(V =-600 mV,I =0.5 nA)。右:(c)中Cr-Cs转子环带位置(红十字标记)测得的I-t谱,显示出具有几个离散值的阶梯状特征(V =-250 mV,I =0.9 nA)。(f),CsV 3 Sb 5 的Sb表面Cr-Cs双原子转子的原子分辨STM形貌。图像中叠加了原子模型和 Sb 蜂窝晶格(白色虚线六边形),显示 Cr 原子围绕 Cs 吸附原子旋转(V s =-500 mV,I t =3 nA)。

机器人操纵的手眼协调
在基于视觉的机器人操作中,当机器人识别物体掌握的对象时,对物体的位置,几何和物理特性的了解并不完美。可变形的物体(例如苏打罐,塑料瓶和纸杯)在学习这些特性的不确定性方面占据了最佳的challenges。为了敏捷地掌握这些,机器人必须在不同的非结构化表示下自适应地控制和协调其手,眼睛和鳍力量的力。换句话说,机器人的手,眼睛和施加力的量必须得到很好的协调。本论文探讨了人类启发的机制的基本原理,并将其应用于基于视觉的机器人抓地力,以开发手眼镜协调以进行可变形的物体操纵。有了一个对象找到任务,机器人遇到了一个无知的对象混乱的非结构化环境。它首先必须查看环境的概述,并存储场景的语义信息,以进行以后的对象触发迭代。使用存储的信息,机器人必须找到所需的对象,仔细抓住它,然后将其带回定义的位置。为了实现感知目标,该机器人首先能够将环境视为一个整体,例如当人类遇到新探索的场景时,并通过模拟视觉选择性注意模型来学会在三维空间中有效地识别对象。最后,在某些特殊情况下,由于人类或以后的迭代中,机器人可能会遇到已经变形的对象。为了更有效地对此进行完善,该机器人还经过训练,可以通过合成的变形对象数据集重新认识这些项目,该对象数据集使用基于直观的Laplacian的网状网格变形过程自动生成。在整个论文中,都解决了这些子问题,并通过在实际机器人系统上进行实验来证明所提出方法的可行性。