机构名称:
¥ 1.0
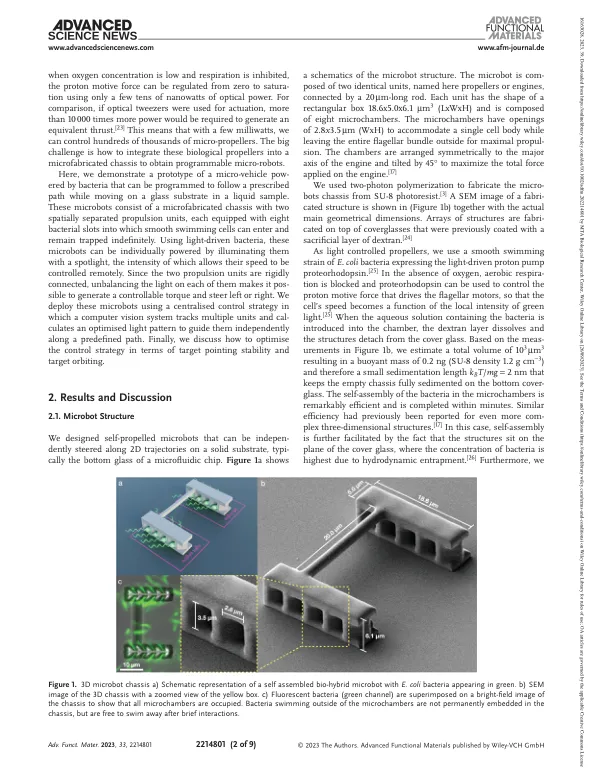
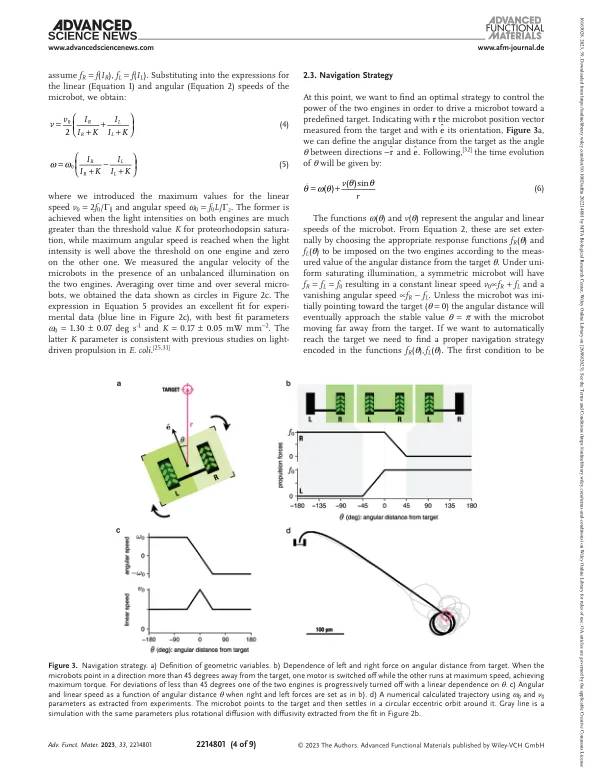
生物杂交微生物将生物执行器和传感器整合到合成机箱中,目的是提供下一代微型机器人技术的基础。主要挑战之一是开发具有一致行为的自组装系统,因此可以独立控制以执行复杂的任务。在这里,可以表明,使用轻驱动细菌作为螺旋桨,可以通过在不同的微型机构零件上不平衡光强度来指导3D打印的微型机器。设计了一个最佳反馈回路,其中中央计算机在每个微型机器上都会在其位置和方向上投射量身定制的光图案。以这种方式,可以通过一系列分布的检查点独立引导多个微型机器。通过利用自然光驱动的质子泵,这些生物杂交微型机器能够以如此高的效率从光中提取机械能,以至于这些系统原则上可以同时以几毫米的总光学功率同时控制这些系统。
polycomb蛋白RYBP在小鼠胚胎干细胞的体外心脏分化过程中激活转录因子plagl1
主要关键词



相关文件推荐