机构名称:
¥ 1.0
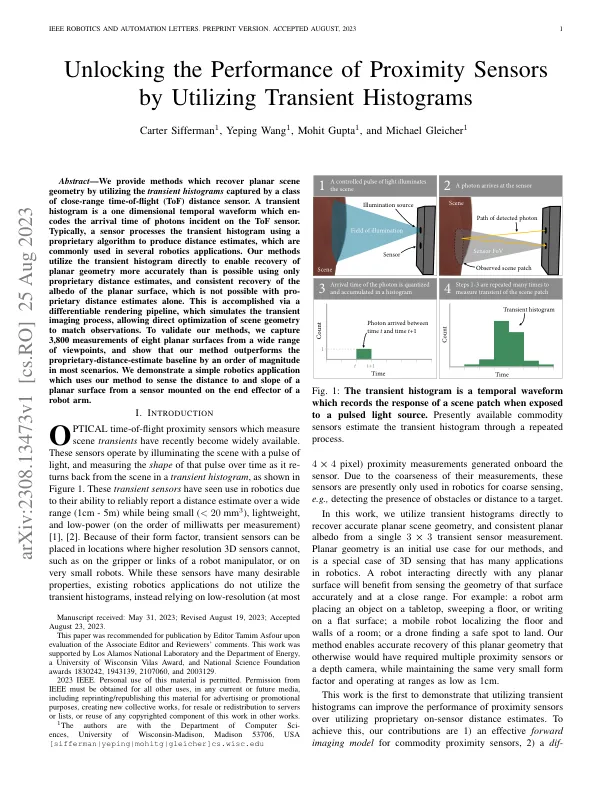
摘要 - 我们提供了通过利用一类近距离飞行时间(TOF)距离传感器捕获的瞬态直方图来恢复平面场景几何形状的方法。瞬态直方图是一个一维的时间波形,它填充了入射在TOF传感器上的光子的到达时间。通常,传感器使用专有算法处理瞬态直方图以产生距离估计值,距离估计值通常在几种机器人应用中使用。我们的方法直接利用了瞬态直方图,以使平面几何形状能够更准确地恢复,仅使用专有距离估计值,并且平面表面的反照率的一致恢复,而单独的距离估计是不可能的。这是通过可区分的渲染管道来完成的,该管道模拟了瞬态成像过程,从而可以直接优化场景几何形状以匹配观测值。为了验证我们的方法,我们从广泛的观点中捕获了八个平面表面的3,800个测量值,并表明我们的方法在大多数情况下都以数量级优于专有距离基线的基线。我们演示了一种简单的机器人应用程序,该应用程序使用我们的方法感知与安装在机器人臂端效应器上的传感器的平面表面的距离和斜率。I. i tratoduction o ptally of飞机近距传感器最近已广泛使用场景瞬变。尽管这些传感器具有许多理想的属性,但现有的机器人应用程序不利用瞬态直方图,而是依靠低分辨率(最多最多这些传感器通过用光脉冲照亮场景,并在瞬态直方图中从场景中重新转移到场景中,从而测量该脉冲的形状,如图1。这些瞬态传感器在机器人技术中的使用是由于它们可靠地报告较大范围内(1cm -5m)的距离估计值,同时较小(<20 mm 3),轻量级和低功率(按测量的毫米级订单)[1],[2],[2]。由于其形式,可以将瞬态传感器放置在较高分辨率3D传感器无法的位置,例如在机器人操纵器的抓地力或链接上,或在非常小的机器人上。
通过使用瞬态直方图解锁接近传感器的性能
主要关键词




相关文件推荐