点击购买,资源将自动在新窗口打开.
获取独家产品信息,尽享促销优惠!立即订阅,不容错过
* 限···时··优惠
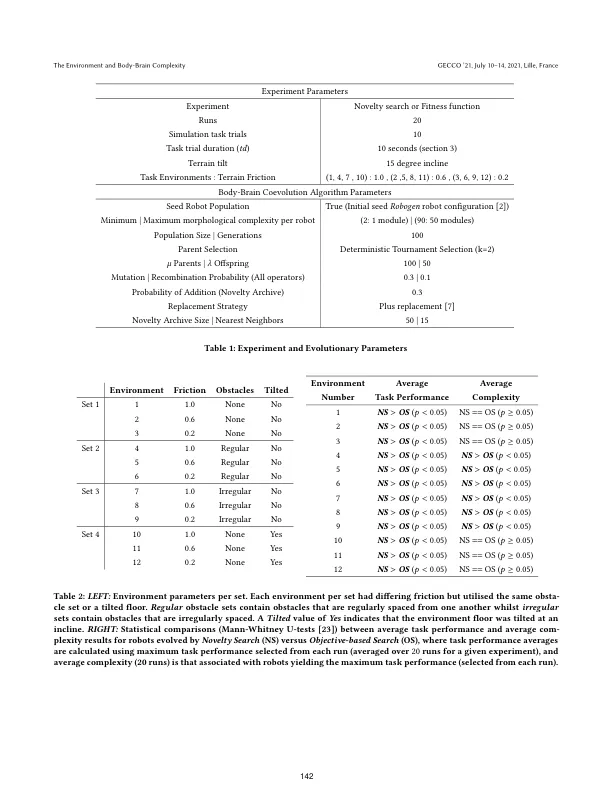
自然和人工进化系统的一个开放性问题是如何以及在环境和进化方面的复杂性演变。这项研究调查了日益复杂的任务环境对ROBOT复杂性演变的影响。具体而言,不断发展的身体脑耦合对机车任务性能的影响,其中机器人的进化是由身体脑探索(新颖性搜索)或基于客观的(健身函数)进化搜索指导的。结果表明,在特定的环境条件下,新颖性搜索能够增强机器人身体复杂性和功效的演变。因此,关键的贡献是表明身体脑探索适合在特定环境中实现高健身机器人的发展机器人复杂性。
主要关键词