机构名称:
¥ 1.0
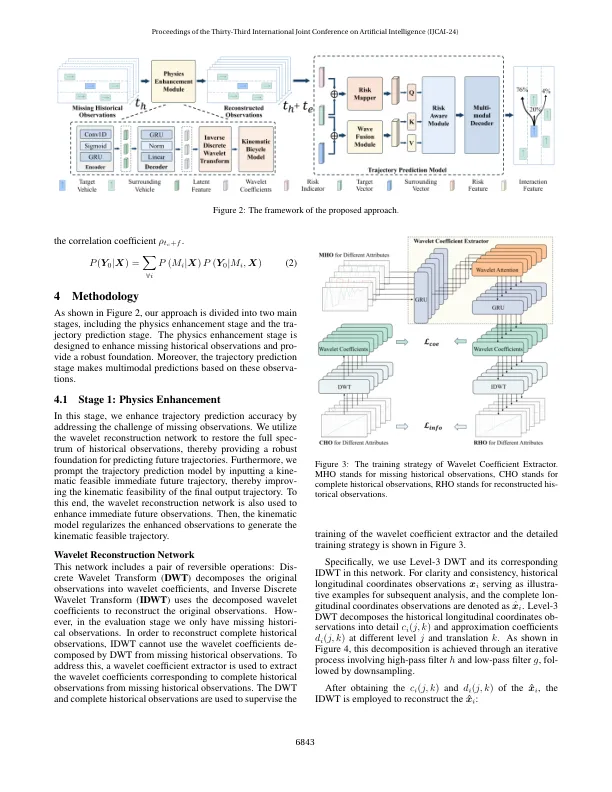
本文介绍了一种新型的自动驾驶汽车(AV)的轨迹预测方法,熟练解决了缺少观察的挑战以及在现实世界驾驶环境中遵守物理定律的需求。这项研究为AVS提供了分层的两阶段轨迹模型。在第一阶段,我们提出了小波重建网络,该网络是一种创新的工具,该工具专业地精心制作,用于重建缺失的观察,并提供与状态模型的可选集成,以增强其稳健性。ad的第二阶段,模型的第二阶段具有波融合编码器,这是一种量子力学启发的创新,用于复杂的车辆相互作用建模。通过合并运动学自行车模型,我们确保我们的预测与逼真的车辆运动学保持一致。融合了我们的方法论进步,我们引入了MocAd-Missing,这是一个全面的现实交通数据集,以及增强的NGSIM和HighD数据集的版本,旨在通过未观察到的环境进行严格的测试。广泛的评估表明,我们的方法明显超过了效果,即使在最多75%缺少观察结果的情况下,也达到了很高的精度。
在缺失观察下自动驾驶的物理信息轨迹预测
主要关键词




相关文件推荐



![课程信息表 [物理]](/simg/8/834e2fa636199e638377cf4e1d71a34246cf6c28.webp)