机构名称:
¥ 1.0
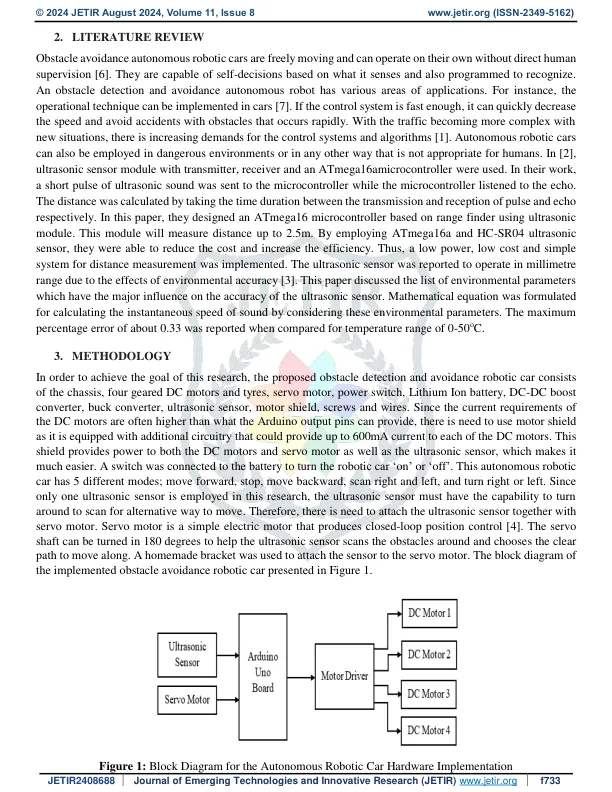
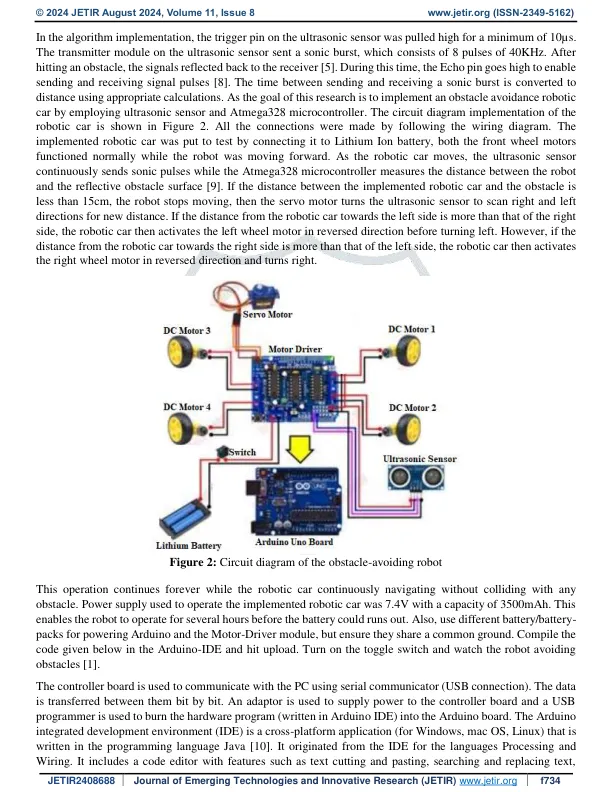
任何自动驾驶机器人汽车的最关键特征之一就是能够避免沿其路径的障碍。自动移动机器人具有内置系统,可以在沿其路径遇到障碍物时引导它。通过发送声音脉冲,可以测量机器人到障碍物的距离,同时控制转向齿轮以实现避免障碍物的功能。在本文中,提出了可以避免障碍的自动机器人汽车的发展。这是通过使用超声传感器来传感障碍并指导其运动来实现的。ATMEGA328微控制器用于从超声传感器中收集距离信息,根据嵌入式算法比较测得的距离,并使用它来确定是向前移动还是更改其路径。通过硬件和软件系统设计,构建了障碍物避免机器人汽车平台,同时获得了良好的实验效果。传感器可以感知的安全距离为15 cm,其角度覆盖面积为180 0。
设计和实施避免障碍...
主要关键词
相关文件推荐