机构名称:
¥ 1.0
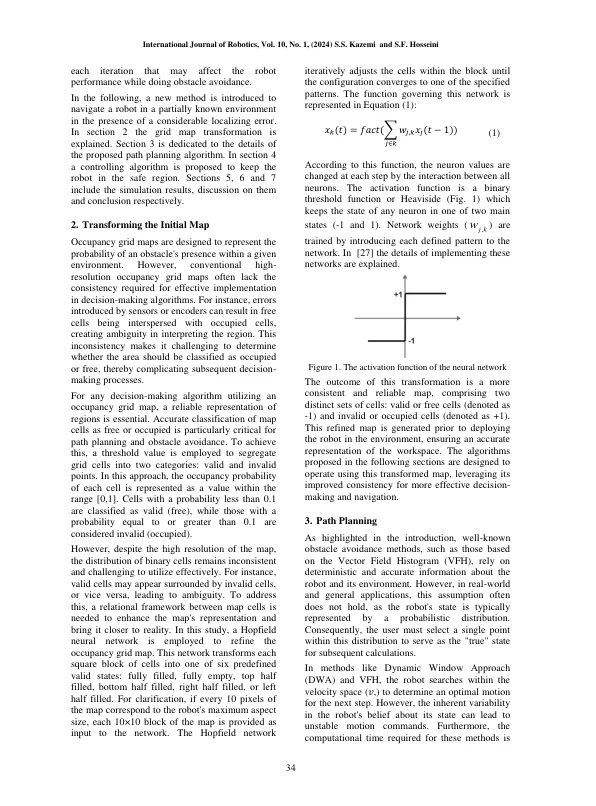
移动机器人在行业和各种服务领域的广泛应用中拥有巨大的潜力。因此,广泛的研究工作致力于解决缺陷并提高其绩效。在机器人技术中的关键挑战中是避免障碍物,这使机器人能够沿着计划的路径遇到的意外物体导航。已经提出了许多方法和算法,以防止机器人和检测到的障碍之间的碰撞。这些方法通常依赖于在每个步骤都具有精确了解机器人位置的关键假设。本文在室内环境中介绍了一种新颖的方法,用于避免障碍物,利用部分已知空间和A*算法的占用网格图。所提出的方法通过有关机器人状态的不精确信息解决了方案。最初,使用人工神经网络将初步的占用网格图改进并转化为增强的图。随后,将A*算法应用于修改的地图。此外,开发了一种算法来指导机器人从起点到目标端点。遇到新出现的障碍时,机器人在避免障碍的同时,动态地适应了达到目标的道路。在三种不同的情况下,通过对两轮机器人的模拟来验证所提出的方法的功效。结果证明了该方法在室内环境中有效浏览机器人的能力,即使具有不精确的状态信息。该算法确保机器人与障碍物保持安全距离,从而展示其实用应用的潜力。
一种新颖的路径计划和避免障碍的方法...
主要关键词


相关文件推荐