机构名称:
¥ 3.0
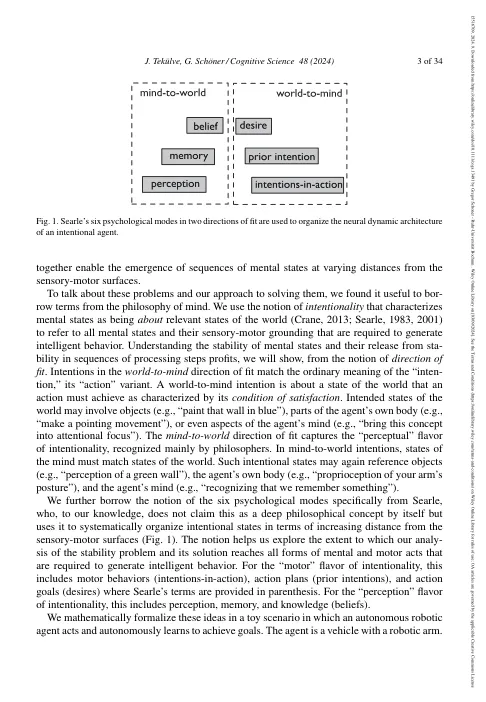
情境化具身智能体如何利用知识实现目标是自然和人工智能的经典问题。生物体如何利用其神经系统实现这一目标是具身认知神经理论面临的核心挑战。为了构建这一挑战,我们借用了塞尔对意向性的分析中的术语,即其两个契合方向和六种心理模式(感知、记忆、信念、行动中的意图、先前意图、愿望)。我们假设意向状态由神经激活模式实例化,而神经激活模式由神经交互稳定。动态不稳定性为启动和终止意向状态提供了神经机制,对于组织意向状态序列至关重要。概念节点网络所表示的信念是自主学习的,并根据期望的结果被激活。意向智能体的神经动力学原理在一个玩具场景中得到演示,其中机器人智能体探索环境并根据学习到的颜色变换规则将物体涂成所需的颜色。
意向性具身代理的神经动力学原理
主要关键词



相关文件推荐