机构名称:
¥ 1.0
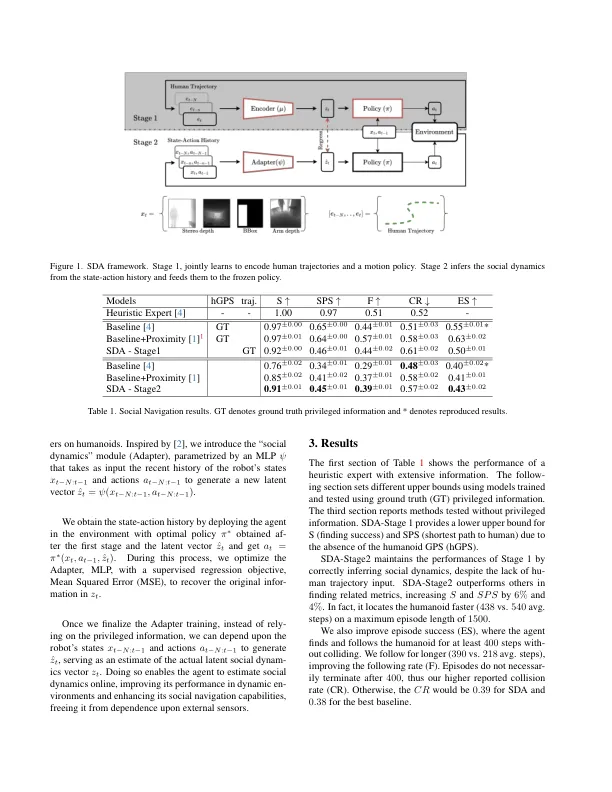
本文提出了一个社会导航的社会动态适应模型(SDA),该模型涉及机器人在以人为中心的环境中导航的能力,同时保持安全的距离并遵守这种规范。关键挑战是处理人类的传统,从机器人的角度和复杂来计算,它们可以部分观察到。提出的SDA模型使用了两个阶段的增强学习框架 - 工作:第一阶段涉及学习编码人类轨迹,第二阶段侵入了机器人的国家行动历史中的社会动态。这种方法已在栖息地3.0平台上进行了测试,在查找和关注Humans方面取得了最新的性能。此工作的扩展版本可在以下网址获得:https://arxiv.org/abs/2404.11327。
遵循社会导航中的人线程
主要关键词

相关文件推荐