机构名称:
¥ 1.0
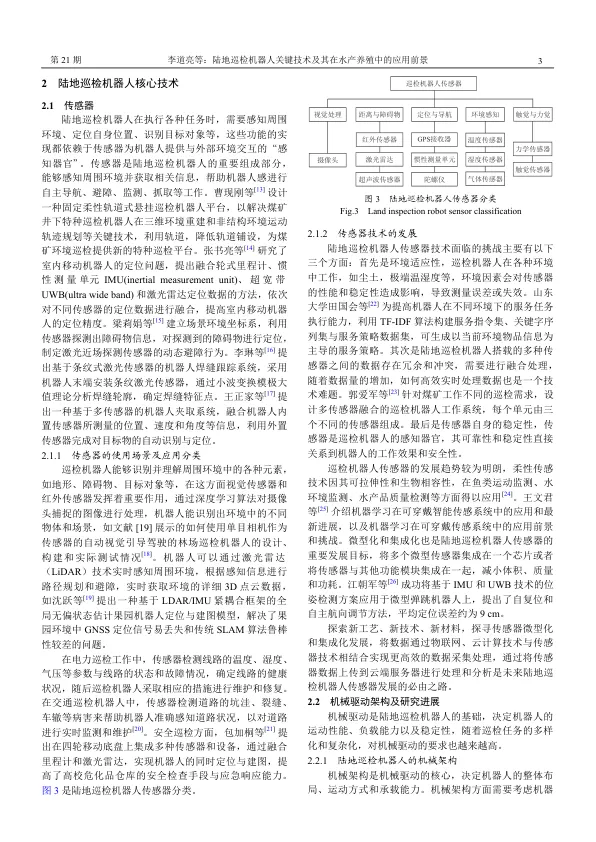
陆地巡检机器人在执行各种任务时,需要感知周围 环境、定位自身位置、识别目标对象等,这些功能的实 现都依赖于传感器为机器人提供与外部环境交互的 “ 感 知器官 ” 。传感器是陆地巡检机器人的重要组成部分, 能够感知周围环境并获取相关信息,帮助机器人感进行 自主导航、避障、监测、抓取等工作。曹现刚等 [ 13 ] 设计 一种固定柔性轨道式悬挂巡检机器人平台,以解决煤矿 井下特种巡检机器人在三维环境重建和非结构环境运动 轨迹规划等关键技术,利用轨道,降低轨道铺设,为煤 矿环境巡检提供新的特种巡检平台。张书亮等 [ 14 ] 研究了 室内移动机器人的定位问题,提出融合轮式里程计、惯 性测量单元 IMU(inertial measurement unit) 、超宽带 UWB(ultra wide band) 和激光雷达定位数据的方法,依次 对不同传感器的定位数据进行融合,提高室内移动机器 人的定位精度。梁莉娟等 [ 15 ] 建立场景环境坐标系,利用 传感器探测出障碍物信息,对探测到的障碍物进行定位, 制定激光近场探测传感器的动态避障行为。李琳等 [ 16 ] 提 出基于条纹式激光传感器的机器人焊缝跟踪系统,采用 机器人末端安装条纹激光传感器,通过小波变换模极大 值理论分析焊缝轮廓,确定焊缝特征点。王正家等 [ 17 ] 提 出一种基于多传感器的机器人夹取系统,融合机器人内 置传感器所测量的位置、速度和角度等信息,利用外置 传感器完成对目标物的自动识别与定位。 2.1.1 传感器的使用场景及应用分类
陆地巡检机器人关键技术及其在水产养殖中的应用前景
主要关键词


相关文件推荐