机构名称:
¥ 1.0
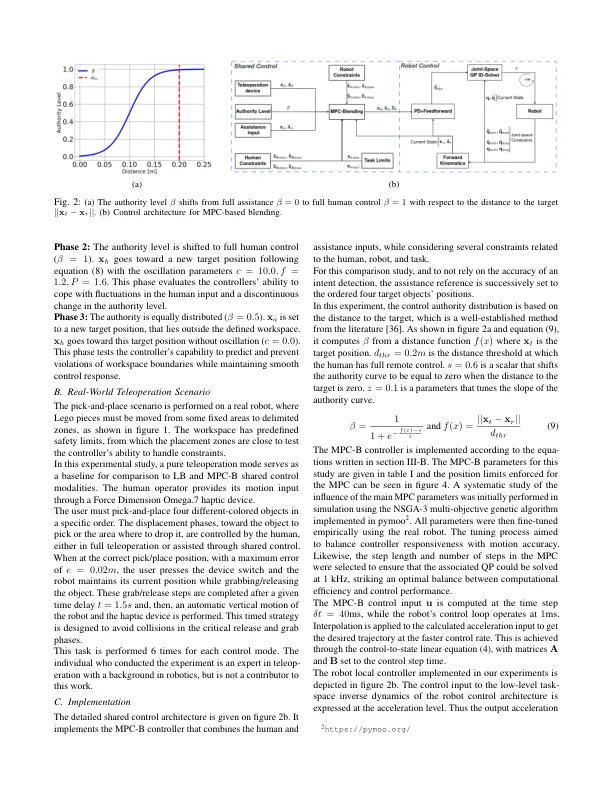
摘要 - 共享的控制方法在苛刻的任务中分配了人类操作员和机器人之间的控制,从而使协作能够利用各自的优势和专业知识。共享任务通常涉及将人类控制输入与(预算计划的辅助轨迹结合在一起的算法)的混合算法。传统的混合技术(例如线性混合)计算组合输出,但不能保证这种共享运动的可行性,也不能确保遵守安全性或与任务相关的约束。本文提议通过将混合策略作为解决最佳控制问题的解决方案来解决可行性和安全性,从而实施环境限制,任务要求和物理能力。使用模型预测控制方法来解决优化问题,并通过预测回收时间范围内的机器人运动来预测约束。我们在模拟和现实世界的拾取和地距离传统实验中评估了这种方法。实验研究将模型预测控制方法与线性混合和完整的近距离进行了比较。结果表明,新框架提供了重大改进,因为它提供了更安全,更准确和可重复的响应。
一种模型预测控制方法共享控制中混合
主要关键词



相关文件推荐