机构名称:
¥ 1.0
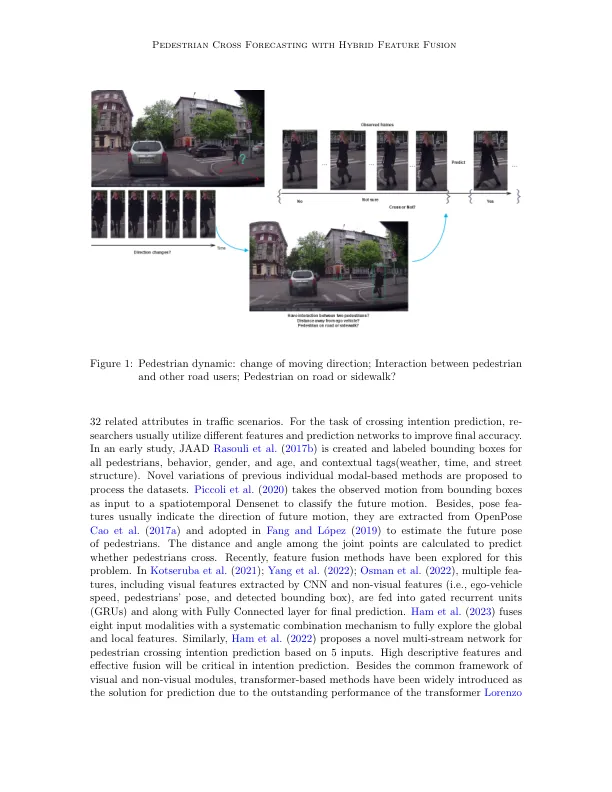
预测行人的穿越意图是在现实世界中安全驾驶自动驾驶汽车(AV)的重要任务。行人的行为通常会受到交通场景中周围环境的影响。基于基于视觉的神经网络的最新作品从图像中提取关键信息以执行预测。但是,在驾驶环境中,存在许多关键信息,例如驱动区域中的社交和场景互动,自我汽车和目标行人之间的位置和距离以及所有目标的运动。如何正确探索和利用上述隐式相互作用将促进自动驾驶汽车的发展。在本章中,两个新颖的属性,行人在道路或人行道上的位置,以及从目标行人到自我卡车的相对距离,这些距离源自语义图和深度图与边界框的相对距离。提出了基于多模式的混合预测网络,以捕获所有特征与预测行人交叉意图之间的相互作用。通过两个公共行人穿越数据集评估PIE和JAAD,拟议的混合框架的表现优于最先进的精度3%。关键字:行人交叉,特征融合
使用混合特征融合
主要关键词




相关文件推荐