机构名称:
¥ 1.0
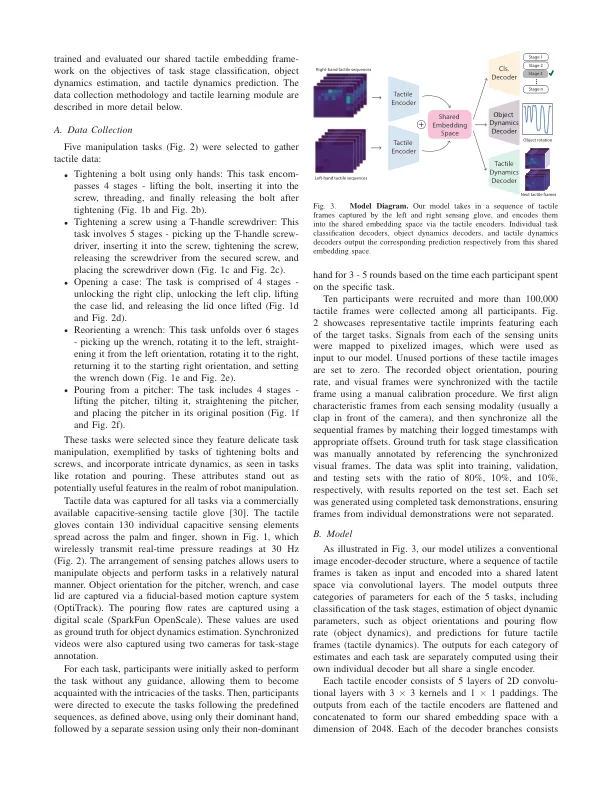
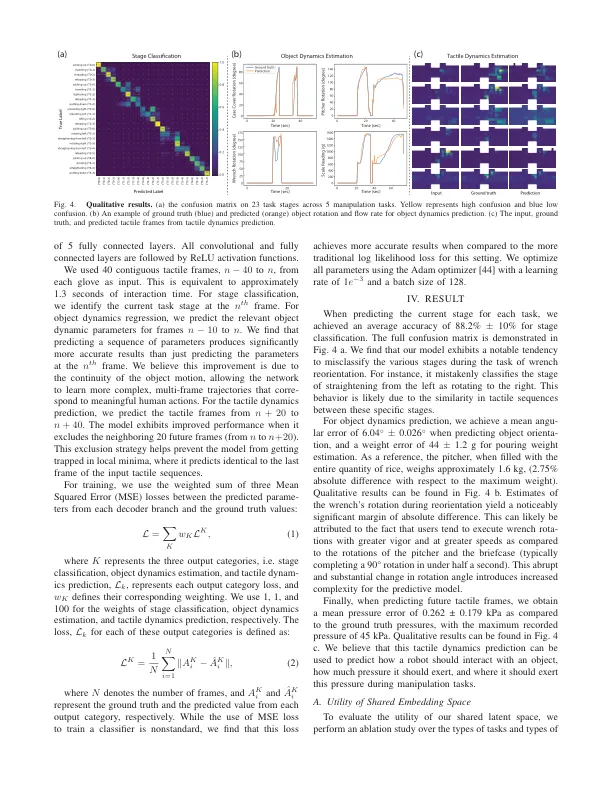
摘要 - 触觉传感在人类的感知和操纵任务中起关键作用,使我们能够直观地理解任务动态并实时适应我们的行动。将这种触觉智能传输到机器人系统将有助于智能代理理解任务约束,并准确地解释他们正在与之交互的对象和自己的操作的动态。尽管由于触觉传感器形式的多样性,操纵任务和学习目标的多样性,虽然将机器人带入这种触觉智能方面已经取得了重大进展,但仍在有效地利用触觉信息。为了应对这一挑战,我们提出了一个统一的触觉嵌入空间,能够预测多种以任务为中心的质量。我们从各种任务中的人类演示中收集触觉数据,并利用此数据来构建一个共享的潜在空间,以进行任务阶段分类,对象动态估计和触觉动态预测。通过实验和消融研究,我们证明了我们共享的触觉潜在空间的有效性,以实现更准确和适应能力的触觉网络,显示出在单任务训练中的提高高达84%。
多任务学习的触觉嵌入
主要关键词


相关文件推荐