机构名称:
¥ 1.0
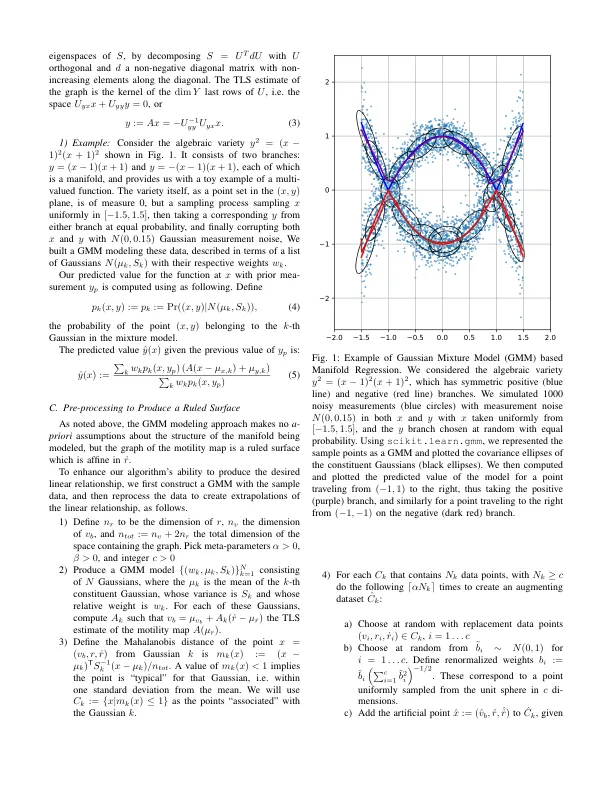
使用来自几何力学的原理构建的机器人运动的数据驱动模型已显示[Bittner,Hatton等。2018; Dan Zhao,Bittner等。2022; Hatton等。2013]为各种机器人提供机器人运动的有用预测。对于具有有用数量DOF的机器人,这些几何力学模型只能在步态附近构建。在这里,我们展示了如何将高斯混合模型(GMM)用作流形学习的一种形式,该形式学习了几何力学“运动图1”的结构,并证明了:[i]与先前发表的方法相比,预测质量的可观改善; [ii]可以应用于任何运动数据集的方法,而不仅仅是周期性步态数据; [iii]一种预先处理数据集以促进在已知运动图是线性的地方外推的方法。我们的结果可以在数据驱动的几何运动模型的任何地方应用。
使用高斯混合物学习机器人运动的几何力学
主要关键词



相关文件推荐