机构名称:
¥ 1.0
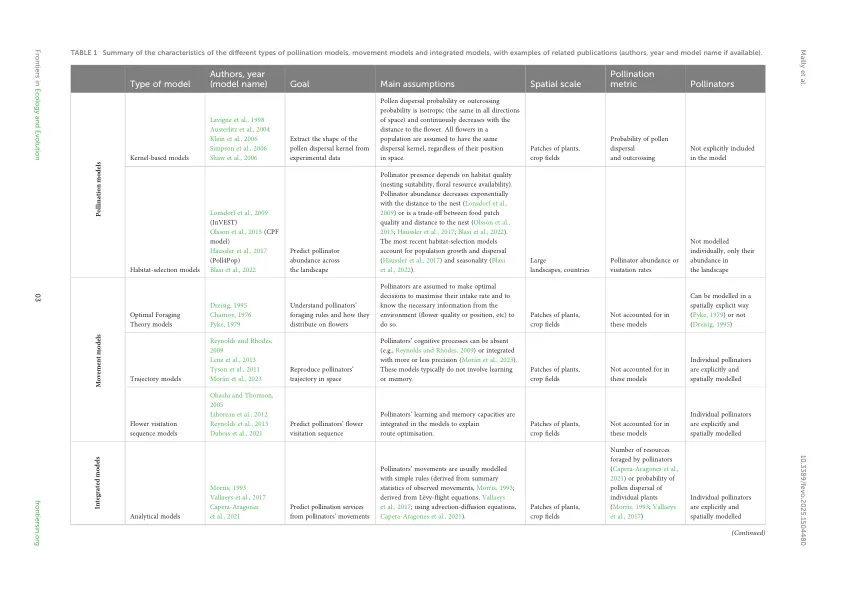
对授粉过程的准确预测是可持续粮食生产和自然生态系统保护的关键挑战。对于许多植物,花粉扩散是由蜜蜂动物的觅食运动介导的。虽然大多数当前的授粉生态模型都采用随机的花粉运动,但对动物行为的研究表明,授粉昆虫,鸟类和蝙蝠如何依赖感官提示,学习和记忆来参观流量,从而产生复杂的运动模式。基于对授粉和运动模型的简要回顾,我们认为我们需要更好地考虑授粉媒介的认知,以改善从各个空间量表中对动物介导的授粉的预测,从单个流动物到植物,植物,栖息地斑块和景观。我们提出了将行为模型整合到授粉模型中的实用路线图,并讨论该合成如何对植物交配模式和拟合度进行修复预测。在动物行为和植物生态学研究之间的这种串扰将为迫在眉睫的危机提供强大的机械工具来预测和对授粉服务采取行动。
将传粉媒介的运动整合到授粉模型
主要关键词




相关文件推荐