机构名称:
¥ 1.0
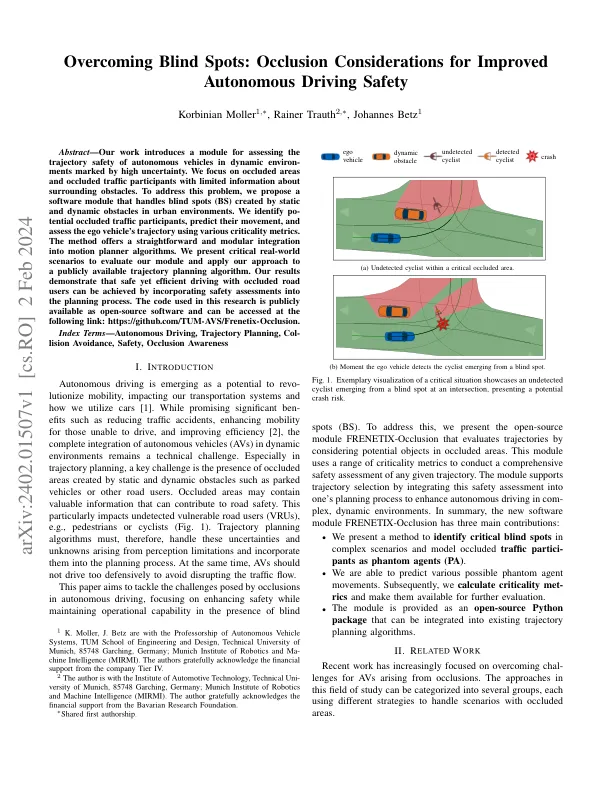
摘要 - 我们的工作引入了一个模块,用于评估以高不确定性为标志的动态环境中自动驾驶汽车的轨迹安全性。我们专注于被阻塞的区域和遮挡的交通参与者,有关周围障碍的信息有限。为了解决这个问题,我们提出了一个软件模块,该模块处理由城市环境中静态和动态障碍物创建的盲点(BS)。我们使用各种批判性指标来确定咬合的交通参与者,预测他们的运动并评估自我车辆的轨迹。该方法提供了直接的模块化集成到运动计划者算法中。我们提出了关键的现实情况,以评估我们的模块并将我们的方法应用于公开可用的轨迹计划算法。我们的结果表明,可以通过将安全评估纳入计划过程来实现安全而有效的驾驶。本研究中使用的代码可作为开源软件公开使用,可以通过以下链接访问:https://github.com/tum-avs/frenetix-occlusion。索引术语 - 自主驾驶,轨迹计划,避免诉讼,安全性,遮挡意识
克服盲点
主要关键词


相关文件推荐