机构名称:
¥ 1.0
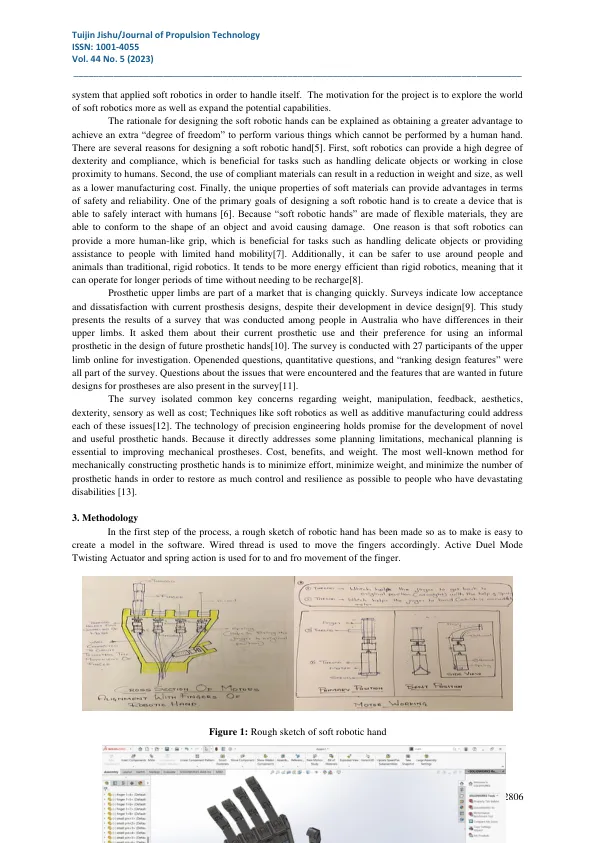
印度[3] GSSSIETW,Mysuru/Electronics&Enerical-Tosennics和传播工程部Mysuru,印度摘要 - 该论文旨在机械地设计低成本的“软机器人手”以获得更好的有效性。软机器人手显着吸引了作为机器人技术的最终效果的焦点。与其他刚性的软机器人手相比,与人类机器人和环境机器人相互作用更安全。除此之外,以最低的成本控制非常容易控制。由于机器人的手是用柔软的材料制成的,因此它的加权也很轻,并且更合规性。本文的目的是设计低成本的软机器人手,以机械的方式获得更好的有效性,了解设计软机器人手所需的各种材料,并理解软机器人手的有效性。设计软机器人手的理由可以解释为获得更大的优势,以实现额外的“自由度”来执行各种事情,而这些事情无法通过人类手索引术语(低成本,软机器人的手,自由度,
低成本软机器人手的设计
主要关键词



相关文件推荐