机构名称:
¥ 2.0
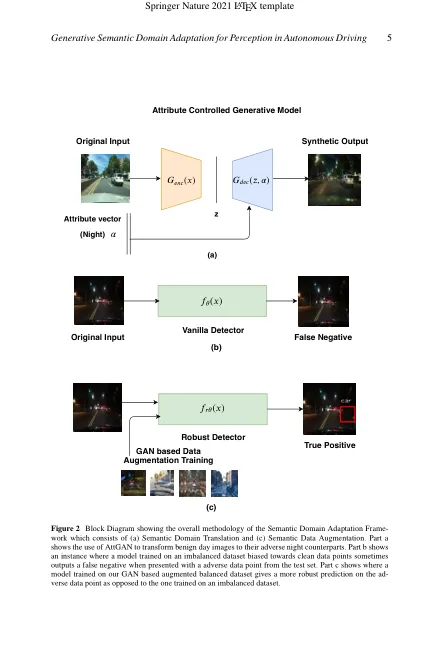
自主驾驶系统取决于他们感知和抑制导航环境的能力。神经网络是这种感知系统的基础,训练这些网络需要大量的不同培训数据,其中包括各种驾驶场景,无论是地形,对象类别和不利的照明/天气条件。但是,大多数公开可用的交通数据集都在清洁天气和照明条件下遭受了损失。数据增强通常被用作改善基于培训机器学习的感知系统的培训数据多样性的策略。然而,标准增强技术(例如翻译和翻转)有助于神经网络概括简单的空间转换,并且需要更多细微的技术来准确地在新颖的测试场景中抗击语义变化。我们提出了一种新的数据增强方法,称为“语义域自适应”,该方法依赖于属性条件的生成模型的使用。我们表明,这样的数据增加通过分析其在基于感知的任务中的性能,例如分类和检测在一天中的不同时间(i)在不同天气条件下(ii)捕获的流量对象的不同数据集,并在不同的天气条件下(ii)在不同的天气条件下,以及使用传统的增强方法培训的模型来提高深层网络的泛化能力。我们进一步表明,基于GAN的增强分类模型比基于非GAN的增强模型对参数对抗性攻击更为强大。
比较物理和虚拟机器人deixis
主要关键词


相关文件推荐