机构名称:
¥ 1.0
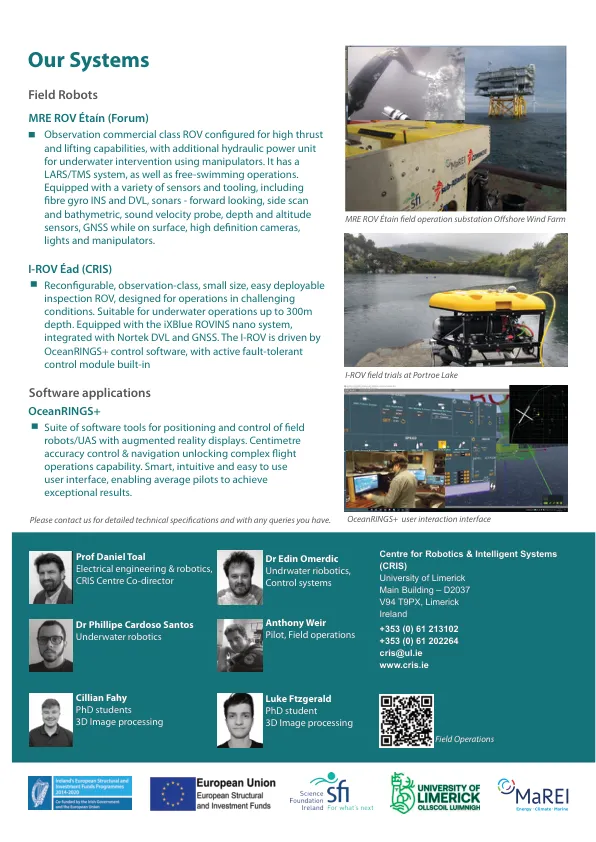
我们的研究涵盖了高级检查和操作系统的开发,shore机载风能技术的运营,Out o {O {O {Out of Shore风力涡轮机阵列操作,海洋观察以及海洋基础设施监测和控制的优化。海洋可再生能源中的操作支持通常发生在流动基础设施上,因此条件通常超出了商业ROV技术的能力和运营限制。这意味着需要新的智能ROV系统功能,这就是我们在CRIS UL的团队正在发展的。我们的重点是开发具有智能相机和声纳的远程操作车辆(ROV),高度的自主权以及在挑战性条件(例如强波和电流)中运行的能力。使用我们的系统,我们旨在大大降低MRE项目的检查成本和干预成本。
机器人和智能系统中心 - CRIS
主要关键词




相关文件推荐