机构名称:
¥ 1.0
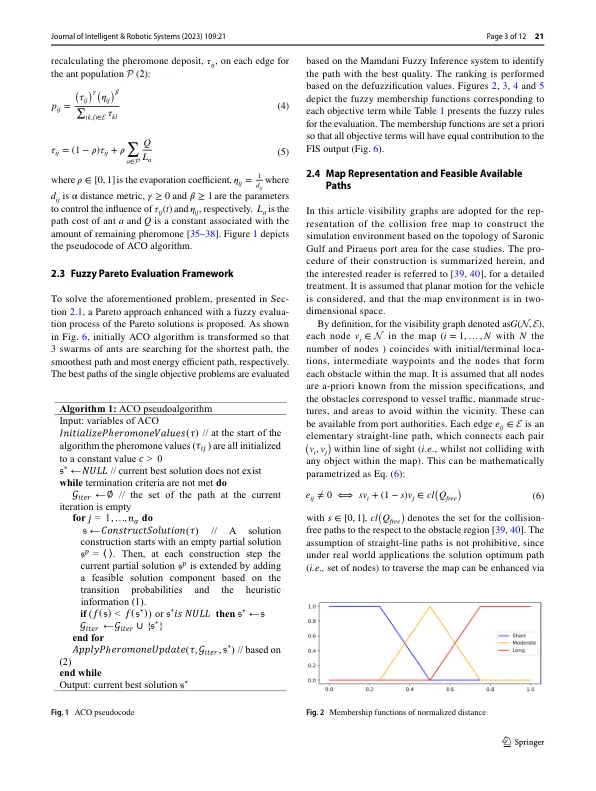
抽象无人的地表车辆(USV)如今已在各种应用中用于安全,检查和交付等。在动态和复杂的环境中运行有效地需要一个最佳的路径计划,其中应考虑多个因素。在本文中,USV的多目标路径计划问题的旨在最大程度地减少行驶距离,并以轨迹平滑度和能量效率并行最大化。用矛盾的术语解决了这个多目标路径计划问题,流行的蚂蚁菌落优化(ACO)算法通过拟议中的模糊帕累托框架增强了。特别是ACO通过找到优化每个单个目标的帕累托解决方案来解决问题。然后通过Mamdani模糊推理系统评估这些解决方案,以识别最佳的推理。该解决方案的排名基于DefuzzifieD值。基于Saronic Gulf拓扑的模拟区域进行了案例研究。结果表明,取决于操作的需求和操作区域的条件(从初始点到目标点的障碍,电流和距离的数量),每个目标都会以不同的方式影响路径质量。
多...
主要关键词


相关文件推荐